AI Native Weekly Newsletter: 06 June 2026
Contents
-
Anthropic Says Claude’s 80% Code Share Points to AI Self-Improvement
-
OpenAI Launches Sites for Codex to Build Interactive Apps
-
Google Releases Gemma 4 12B for Local Multimodal AI
-
Microsoft Brings OpenClaw to Windows with Security Containers
-
Microsoft and NVIDIA Launch RTX Spark for Windows AI PCs
-
Unitree Announces H2 Plus Humanoid Robot on NVIDIA Isaac GR00T
Anthropic Says Claude’s 80% Code Share Points to AI Self-Improvement
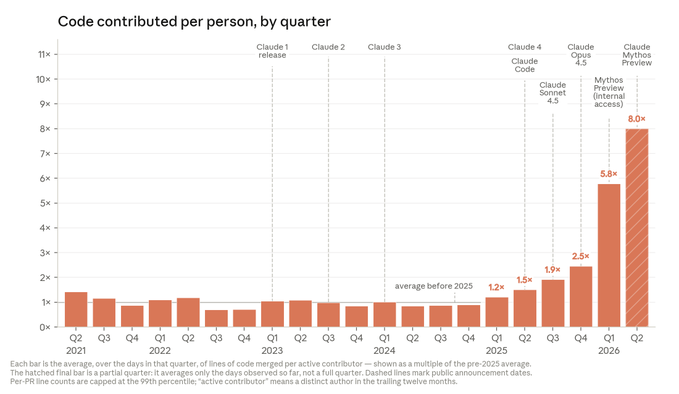
Anthropic said Claude now authors more than 80% of the code merged into the company’s production systems as of May 2026, up from single digits before February 2025. The company says this trend points to a possible path toward recursive self-improvement, where AI systems could eventually help build more capable successors. Anthropic engineers now ship about 8 times as much code per quarter compared with 2021–2025, with Claude handling coding tasks that previously took humans hours to complete. The company warns that AI systems accelerating their own development could move faster than many institutions are prepared to manage.
OpenAI Launches Sites for Codex to Build Interactive Apps
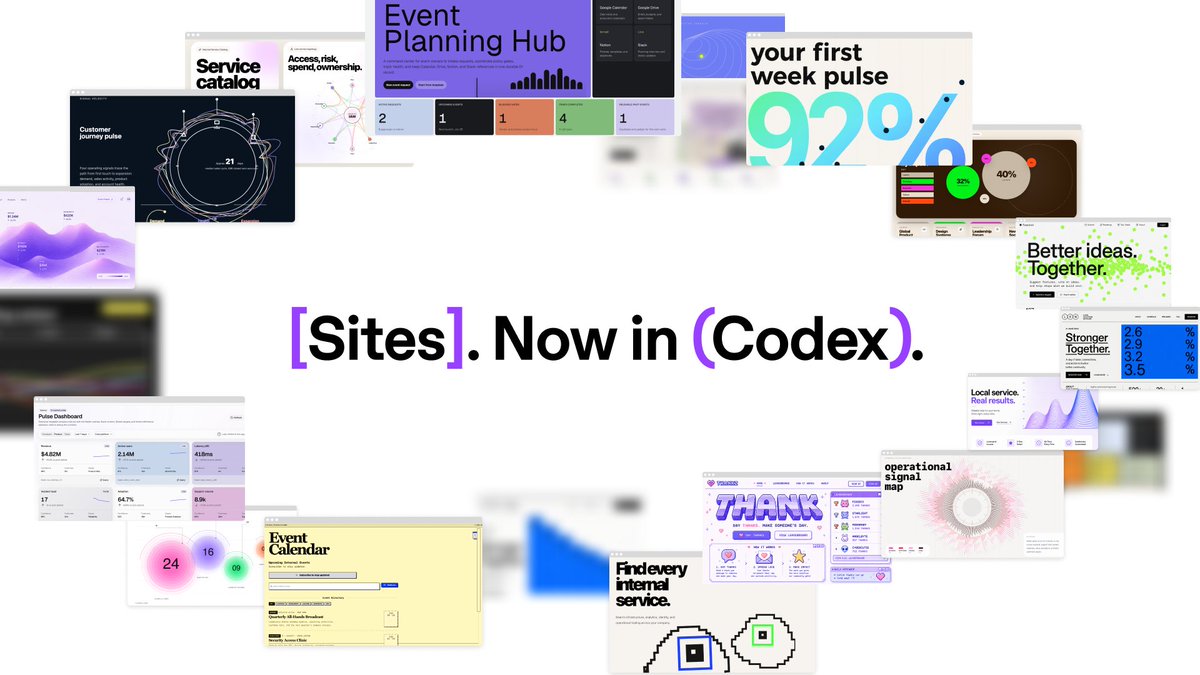
OpenAI announced Sites, a new Codex feature that allows users to create, share, and host interactive websites and apps through natural language prompts. Sites is rolling out in preview to Business and Enterprise customers first. Users can transform ideas, analysis, and plans into dashboards, planners, review workspaces, project boards, and other lightweight tools that can be shared with workspace members via URL. The feature expands Codex from a coding assistant into a tool for creating interactive workspaces and usable software experiences.
Google Releases Gemma 4 12B for Local Multimodal AI

Google DeepMind released Gemma 4 12B, a 12-billion-parameter multimodal model designed to bring agentic multimodal intelligence directly to laptops. The model processes text, images, and audio with a unified architecture, without separate multimodal encoders. Gemma 4 12B can run locally with 16 GB of VRAM or unified memory and is released under an Apache 2.0 license. It is also the first mid-sized Gemma model to support native audio input, while delivering benchmark performance close to Google’s larger 26B model with a smaller memory footprint.
Microsoft Brings OpenClaw to Windows with Security Containers
Microsoft announced that OpenClaw now runs securely on Windows using Microsoft Execution Containers technology. The integration allows OpenClaw’s node and gateway to run with policy-driven containment for enterprise and local agent deployments. Microsoft also introduced a Windows companion app for setting up new Claws or connecting to existing ones. Together with Agent 365, the update is designed to help enterprises observe, govern, and secure AI agents on Windows.
Microsoft and NVIDIA Launch RTX Spark for Windows AI PCs
Microsoft and NVIDIA announced NVIDIA RTX Spark, a platform designed to power highly efficient thin-and-light Windows PCs for developers, creators, and power users. RTX Spark systems are purpose-built for the new wave of AI agents, with up to 128 GB of unified memory and integrated CPU/GPU/memory architecture optimized for local agentic workloads. The platform will support NVIDIA OpenShell on Windows, built on new Windows security and containment features for running agents locally. RTX Spark-powered laptops and small form factor desktop PCs from Microsoft Surface, ASUS, Dell, HP, Lenovo, MSI, and other OEMs are expected to launch beginning this fall.
Unitree Announces H2 Plus Humanoid Robot on NVIDIA Isaac GR00T
Unitree announced H2 Plus, a humanoid robot platform built on NVIDIA Isaac GR00T. The system combines Unitree’s H2 humanoid body, dual SharpaWave tactile five-finger hands, NVIDIA Jetson Thor onboard compute, and Isaac GR00T open software. It comes with open models, simulation frameworks, and validated workflows from data to deployment. The platform is designed to support humanoid reasoning, learning, multitask behavior, and real-time onboard robot inference and control.