AI Native Daily Paper Digest – 20260618
1. Beyond the Current Observation: Evaluating Multimodal Large Language Models in Controllable Non-Markov Games
🔑 Keywords: RNG-Bench, multimodal foundation models, Memory Gap, multi-step interaction, Matching Pairs
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The paper introduces RNG-Bench, a benchmark suite to evaluate multimodal foundation models’ ability to reconstruct past observations and use them for decision-making in multi-step interactions.
🛠️ Research Methods:
– RNG-Bench includes two games, Matching Pairs and 3D Maze, with controlled difficulty parameters. It employs a Memory Gap metric to distinguish forgetting from poor decision-making and a head-to-head duel protocol to control instance-level variance.
💬 Research Conclusions:
– The hardest game configurations challenge existing models with 128K tokens and 350 image inputs per episode. Analysis shows that errors are mostly due to forgetting rather than suboptimal decisions. Fine-tuning Qwen3.5-9B on optimal-policy rollouts enhances performance on RNG-Bench without degrading general multimodal capability.
👉 Paper link: https://huggingface.co/papers/2606.19338
2. Kairos: A Native World Model Stack for Physical AI
🔑 Keywords: Native world model, Physical AI, Native Pre-training Paradigm, Hybrid Linear Temporal Attention, Deployment-Aware System Co-Design
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The main goal is to develop Kairos, a native world model framework for efficiently handling physical AI applications by learning from diverse experiences and maintaining persistent states.
🛠️ Research Methods:
– Kairos utilizes a Native Pre-training Paradigm guided by a Cross-Embodiment Data Curriculum to organize data effectively.
– The Native Unified Architecture with Hybrid Linear Temporal Attention is implemented to maintain persistent states and limit error accumulation.
– Incorporates a Deployment-Aware System Co-Design for efficient real-world application across various hardware.
💬 Research Conclusions:
– Experiments demonstrate Kairos’ top-level performance and its strategic efficiency-capability trade-off, making it a robust operational foundation for self-evolving physical intelligence in real-world scenarios.
👉 Paper link: https://huggingface.co/papers/2606.16533
3. The Reward Was in Your Data All Along: Correcting Flow Matching with Discriminator-Guided RL
🔑 Keywords: Discriminator-Guided RL, pretrained representation space, visual fidelity, semantic quality, KL-regularized RL
💡 Category: Generative Models
🌟 Research Objective:
– The main objective is to address alignment issues in score- and flow-matching models using Discriminator-Guided Reinforcement Learning (DRL) to improve visual fidelity and semantic quality without reliance on human preferences.
🛠️ Research Methods:
– The authors propose using a discriminator trained to separate data from model samples in a pretrained representation space as an optimal reward signal in KL-regularized Reinforcement Learning, which bypasses the need for preference-based reinforcement learning.
💬 Research Conclusions:
– DRL effectively reduces guidance-free Fréchet Inception Distance (FID) and semantic-space FID across various models, showing consistent improvement in image quality and preference alignment while minimizing low-level artifacts such as oversaturation and excessive brightness.
👉 Paper link: https://huggingface.co/papers/2606.19162
4. SAE Interventions are Unreliable: Post-Intervention Recovery of Suppressed Behavior
🔑 Keywords: Sparse Autoencoders, residual-space optimization, feature-level intervention, post-intervention recovery, behavioral control
💡 Category: Machine Learning
🌟 Research Objective:
– Investigate the effectiveness and limitations of Sparse Autoencoders (SAEs) in controlling model behavior through feature-level intervention.
🛠️ Research Methods:
– Analysis of SAE decompositions to identify vulnerabilities in latent-space defenses.
– Optimization techniques to recover original behaviors via constrained residual-space optimization.
– Encoder-orthogonal updates and feature-map Jacobian usage to test intervention resilience across different experimental settings including TPP, unlearning, IOI, and refusal steering.
💬 Research Conclusions:
– Current SAE feature-level interventions may not guarantee complete behavioral control, as behaviors can be recovered through residual-space optimization.
– Despite feature-level success, behaviors can often revert, evidenced by a 95.8% recovery rate in critical settings like refusal-steering, exposing a disconnect between feature manipulation and comprehensive behavioral control.
👉 Paper link: https://huggingface.co/papers/2606.18322
5. Native Active Perception as Reasoning for Omni-Modal Understanding
🔑 Keywords: OmniAgent, omni-modal agent, Observation-Thought-Action cycle, active perception, Agentic Reinforcement Learning
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To develop OmniAgent, an omni-modal agent that enhances long video understanding through an iterative observation-thought-action cycle, improving efficiency and performance over larger models.
🛠️ Research Methods:
– OmniAgent uses a POMDP-based Observation-Thought-Action cycle and introduces Agentic Supervised Fine-Tuning with trajectory synthesis and quality control, as well as Agentic Reinforcement Learning employing TAURA for effective credit assignment.
💬 Research Conclusions:
– The OmniAgent demonstrates positive test-time scaling and achieves state-of-the-art performance on benchmarks like VideoMME and LVBench, outperforming larger models such as Qwen2.5-VL-72B.
👉 Paper link: https://huggingface.co/papers/2606.19341
6. Trust the Right Teacher: Quality-Aware Self-Distillation for GUI Grounding
🔑 Keywords: Quality-aware self-distillation, vision-language models, GUI grounding, correctness-aware gating, teacher-probability scaling
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To enhance vision-language model performance for GUI grounding by improving coordinate-token teacher signals using quality-aware self-distillation.
🛠️ Research Methods:
– The study proposes a quality-aware self-distillation method that integrates soft correctness-aware gating and teacher-probability scaling to address the shortcomings of naive on-policy self-distillation for GUI grounding.
💬 Research Conclusions:
– The combination of correctness-aware gating and teacher-probability scaling improves overall performance in GUI grounding tasks, outperforming strong baselines and consistently enhancing the base model across six benchmarks.
👉 Paper link: https://huggingface.co/papers/2606.18101
7. STARE: Surprisal-Guided Token-Level Advantage Reweighting for Policy Entropy Stability
🔑 Keywords: STARE, GRPO, policy entropy collapse, surprise-guided advantage reweighting, Reinforcement Learning
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The paper aims to address the issue of policy entropy collapse in GRPO algorithms during the training of large language models by utilizing surprisal-guided token-level advantage reweighting and target-entropy regulation.
🛠️ Research Methods:
– A first-order gradient analysis of token-level entropy dynamics is conducted, leading to the identification and mitigation of token-level credit assignment mismatches. This process involves batch-internal surprisal quantiles, advantage reweighting, and target-entropy closed-loop regulation.
💬 Research Conclusions:
– The proposed STARE framework successfully maintains stable reinforcement learning training across different model scales and task families by avoiding policy entropy collapse. It outperforms existing baselines like DAPO, achieving 4%-8% higher accuracy, and demonstrates an effective exploration-exploitation balance.
👉 Paper link: https://huggingface.co/papers/2606.19236
8. ViT-Up: Faithful Feature Upsampling for Vision Transformers
🔑 Keywords: Vision Transformers, dense prediction tasks, feature upsampling, image guidance, hidden states
💡 Category: Computer Vision
🌟 Research Objective:
– To develop ViT-Up, a feature upsampling framework for Vision Transformers to improve dense prediction tasks by utilizing layer-wise query construction from hidden states.
🛠️ Research Methods:
– ViT-Up employs intermediate ViT hidden states for feature prediction at continuous image coordinates, eliminating the need for external image guidance and improving alignment with the backbone feature space.
💬 Research Conclusions:
– ViT-Up outperforms state-of-the-art image-guided upsamplers, achieving significant improvements in semantic correspondence and dense prediction metrics on benchmarks like Cityscapes and SPair-71k, demonstrating enhanced scalability with larger backbones.
👉 Paper link: https://huggingface.co/papers/2606.14024
9. Beyond Alignment: Value Diversity as a Collective Property in Multicultural Agent Systems
🔑 Keywords: Multicultural Multi-Agent Systems, Cultural Alignment, Value Diversity, Social Interaction, Collective Decision-Making
💡 Category: Knowledge Representation and Reasoning
🌟 Research Objective:
– The study aims to propose value diversity as a system-level evaluation axis for multicultural multi-agent systems, examining its impact on representing cultural plurality.
🛠️ Research Methods:
– The research utilizes responses from the World Values Survey to evaluate 19 cultures and 18 backbone models, assessing value diversity across various system configurations.
💬 Research Conclusions:
– The findings demonstrate that diversity and alignment are complementary properties, with current systems performing below human societies in value diversity. Social interaction reduces diversity, thus narrowing the breadth of collective decision-making; mixed-backbone systems can lessen but not eliminate this gap.
👉 Paper link: https://huggingface.co/papers/2606.05985
10. SciOrch: Learning to Orchestrate Expert LLMs for Solving Frontier Multimodal Scientific Reasoning Tasks
🔑 Keywords: Scientific reasoning, Frontier LLMs, Lightweight orchestrator, MCTS-based training, GRPO-style optimization
💡 Category: Knowledge Representation and Reasoning
🌟 Research Objective:
– To improve scientific reasoning capabilities by coordinating multiple frontier large language models through a lightweight orchestrator framework.
🛠️ Research Methods:
– Utilization of a lightweight 8B model orchestrator to decompose and delegate questions to selected commercial models via API calls, employing MCTS-based approach and GRPO-style optimization to enhance orchestration efficiency.
💬 Research Conclusions:
– SciOrch framework achieves 56.66% accuracy, outperforming the top single commercial model by 3.74% and multi-agent baselines by 3.33%, while reducing API costs by more than half compared to typical multi-agent methods.
👉 Paper link: https://huggingface.co/papers/2606.15872
11. When Does Trajectory-Level Supervision Permit Efficient Offline Reinforcement Learning?
🔑 Keywords: Offline reinforcement learning, Outcome supervision, Pessimistic actor-critic, OPAC, Sample efficiency
💡 Category: Reinforcement Learning
🌟 Research Objective:
– To develop a statistical theory for policy optimization from trajectory-level outcome supervision in offline reinforcement learning, addressing challenges using a pessimistic actor-critic approach.
🛠️ Research Methods:
– Introduced the OPAC algorithm which utilizes a latent reward model for optimizing policy via trajectory-level labels, and extended the method to preference-based feedback to uphold statistical guarantees.
💬 Research Conclusions:
– Identified circumstances where outcome-level supervision is sample-efficient for offline control and formed conditions under which generalized outcome-based offline RL remains tractable, highlighting fundamental statistical barriers with missing process-level rewards.
👉 Paper link: https://huggingface.co/papers/2606.18531
12. IndustryBench-MIPU: Benchmarking Multi-Image Attribute Value Extraction for Industrial Products
🔑 Keywords: IndustryBench-MIPU, Multi-Modal Learning, Multimodal Large Language Models, Structured Attribute Extraction, Cross-Image Evidence Integration
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– Introduce IndustryBench-MIPU, the first large-scale benchmark for understanding industrial products through multi-image analysis, focusing on structured attribute extraction from heterogeneous product images.
🛠️ Research Methods:
– Built around recovering property-value pairs from product images, involving text recognition, visual reasoning, domain knowledge decoding, and cross-image evidence integration.
– Constructed through multi-model consensus and three-tier quality assurance, spanning 4,559 products and 27,652 images in 18 industrial categories.
💬 Research Conclusions:
– Evaluation of nine Multimodal Large Language Models demonstrated high precision (86–94%) yet a significant completeness gap, with models recovering only up to 49.9% of product-level attributes.
– Emphasized that the core bottleneck lies in multi-image completeness rather than single-image accuracy.
– Dataset and code are publicly available for further research and development.
👉 Paper link: https://huggingface.co/papers/2606.14383
13. REVES: REvision and VErification–Augmented Training for Test-Time Scaling
🔑 Keywords: Large Language Model, policy optimization, intermediate steps, error identification, sequential revision
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The research aims to enhance Large Language Model reasoning by using a two-stage iterative framework that alternates between data augmentation and policy optimization.
🛠️ Research Methods:
– The methods involve converting intermediate steps in model recovery trajectories into revision and verification prompts to focus on effective answer transformation and error identification, thus optimizing training dynamics.
💬 Research Conclusions:
– The approach showed significant performance gains over existing reinforcement learning baselines on coding benchmarks and constraint satisfaction problems, demonstrating improved correction ability and generalization to out-of-distribution puzzles.
👉 Paper link: https://huggingface.co/papers/2606.18910
14. Physics-IQ Verified
🔑 Keywords: Physics-IQ benchmark, Video generative models, Physical understanding, Sample-level scoring, Prompt quality
💡 Category: Generative Models
🌟 Research Objective:
– The research aimed to evaluate and improve the Physics-IQ benchmark for more reliable assessment of physically accurate video generation.
🛠️ Research Methods:
– Conducted a systematic audit of the Physics-IQ benchmark, identified limitations, and proposed solutions including enhanced prompt quality and a new sample-level scoring system.
💬 Research Conclusions:
– The improved benchmark, Physics-IQ Verified, refines 57.6% of samples and enhances 34.8% of prompts, offering a more reliable tool for assessing video generative models’ physical understanding. In comparative studies, notable changes in model rankings were observed.
👉 Paper link: https://huggingface.co/papers/2606.18943
15. Bag of Dims: Training-Free Mechanistic Interpretability via Dimension-Level Sign Patterns
🔑 Keywords: Transformer hidden states, Semantic content, Binary registers, Bag of Dims framework, Token cache
💡 Category: Machine Learning
🌟 Research Objective:
– The paper investigates the standard basis of transformer hidden states as a training-free and architecture-general feature representation, which encodes semantic content and confidence.
🛠️ Research Methods:
– The study employs a Bag of Dims framework across various models in language, vision, and audio domains to validate the utility of dimension sign patterns and magnitude in predictive tasks.
💬 Research Conclusions:
– The research concludes that standard basis feature reading does not require learned transformations or intensive optimization, highlighting the independence of dimensions and the sufficiency of sign patterns for maintaining top predictive accuracy across multiple modalities.
👉 Paper link: https://huggingface.co/papers/2606.12629
16. Reinforcement Learning-Guided Retrieval with Soft Fusion for Robust Multimodal Imitation Learning under Missing Modalities
🔑 Keywords: RL4IL, Reinforcement Learning, Imitation Learning, Sensor Dropout, Missing-Modality
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– Introduce RL4IL, a reinforcement learning method to enable robust robotic manipulation in scenarios of sensor dropout by using relevant demonstrations and imputation of missing modalities.
🛠️ Research Methods:
– Utilizes reinforcement learning with Proximal Policy Optimisation and Breadth-First Search for selecting relevant expert demonstrations.
– Employs a soft cross-attention fusion head and soft imputation head to handle missing modalities without retraining.
💬 Research Conclusions:
– RL4IL significantly outperforms state-of-the-art imitation learning methods under sensor dropout conditions, without requiring additional policy network training.
👉 Paper link: https://huggingface.co/papers/2606.15514
17. Morpheus: A Morphology-Aware Neural Tokenizer and Word Embedder for Turkish
🔑 Keywords: Morpheus, Turkish, morphology-aware embeddings, reversible tokenizers, lexical retrieval
💡 Category: Natural Language Processing
🌟 Research Objective:
– To develop a neural morpheme-boundary model, Morpheus, that achieves lossless tokenization and morphology-aware embeddings for Turkish, enhancing efficiency and performance over traditional subword methods.
🛠️ Research Methods:
– Utilized a differentiable Poisson-binomial dynamic program to transform per-character boundary probabilities into soft morpheme memberships, ensuring exact segments at inference without string normalization.
💬 Research Conclusions:
– Morpheus outperformed traditional methods by achieving the lowest bits-per-character and improving gold morphological alignment while reducing GPU memory usage. It also excelled in lexical retrieval, surpassing competitive multilingual systems.
👉 Paper link: https://huggingface.co/papers/2606.18717
18. LLM-Enabled NWDAF: A Step Toward AI-Native 6G Network Intelligence
🔑 Keywords: Network Data Analytics Function, Free5GC, Large Language Model, AI-native, conversational interface
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The study aims to develop an open-source Network Data Analytics Function (NWDAF) compatible with Free5GC that integrates a Large Language Model interface for natural language interaction and intent-based network management in 5G networks.
🛠️ Research Methods:
– The implementation involves collecting network data via subscriptions to Network Functions and includes a Large Language Model to process user intents, which are encoded using a semantic embedding model, mapping them to predefined intent categories to trigger analytics queries.
💬 Research Conclusions:
– The integration of AI-driven intent recognition and standardized network analytics enhances operator usability, abstracts traditional interface complexities, and provides a foundation for AI-native 6G networks, demonstrating improved network management accessibility for non-experts.
👉 Paper link: https://huggingface.co/papers/2606.11877
19.

20. Re-Centering Humans in LLM Personalization
🔑 Keywords: LLM personalization, synthetic data, human data, user attributes, automated personalization
💡 Category: Human-AI Interaction
🌟 Research Objective:
– The study aims to analyze the performance gap in large language models (LLMs) personalization when using synthetic versus human data, focusing on real-world applicability.
🛠️ Research Methods:
– Human conversations and judgments were collected to study personalization across three stages: extracting user attributes, pairing attributes with prompts, and generating personalized responses.
💬 Research Conclusions:
– Current models demonstrate significant limitations in extracting user attributes from human conversations and generating personalized responses that align with human judgments, despite performing well in synthetic setups. The study introduces lightweight training interventions to bring automated evaluations closer to human data standards.
👉 Paper link: https://huggingface.co/papers/2606.06614
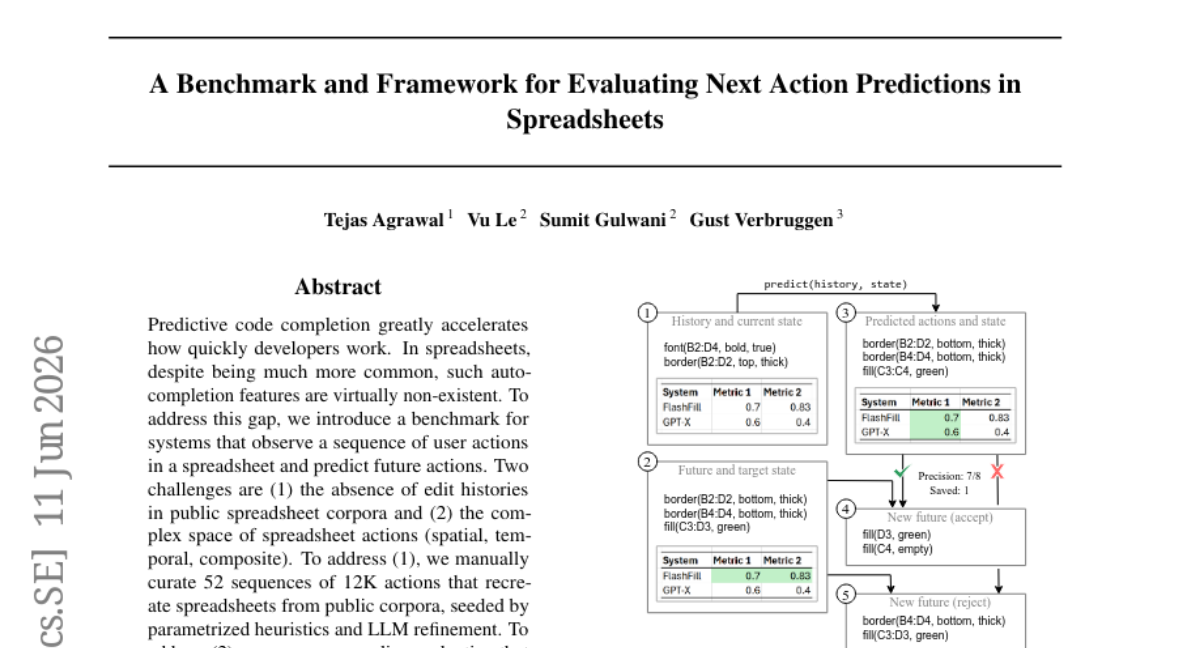
21. A Benchmark and Framework for Evaluating Next Action Predictions in Spreadsheets
🔑 Keywords: predictive code completion, spreadsheets, user actions, benchmark, online evaluation
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The paper introduces a benchmark aimed at predicting spreadsheet user actions to enhance predictive code completion capabilities, filling a significant gap in current spreadsheet functionalities.
🛠️ Research Methods:
– The authors manually curated 52 sequences of 12,000 actions using public spreadsheet corpora, sophisticated heuristics, and LLM refinement to address the absence of edit histories. They employed an online evaluation methodology to navigate the complex space of spreadsheet actions, which includes spatial, temporal, and composite elements.
💬 Research Conclusions:
– The research evaluates multiple baseline predictors and discovers insights into action saving properties, false positives, efficiency, impact of user profiles, triggers, and context, offering valuable lessons for future spreadsheet auto-completion advancements.
👉 Paper link: https://huggingface.co/papers/2606.13802
22. HiLo-Token: Input-Adaptive High-Low Frequency Token Compression for Efficient Image Editing
🔑 Keywords: HiLo-Token, Diffusion Transformers, token compression, spatial frequency, image editing
💡 Category: Generative Models
🌟 Research Objective:
– The research introduces HiLo-Token, a novel token compression framework designed to accelerate Diffusion Transformers in image editing tasks by adaptively allocating tokens based on spatial frequency and context importance.
🛠️ Research Methods:
– The method involves maintaining all tokens within a user-specified editing mask, and employs a high-frequency token selection strategy outside this region to capture important local details.
💬 Research Conclusions:
– Extensive experiments demonstrated significant speedups of up to 3.13x without quality loss in image editing tasks, highlighting the effectiveness of the HiLo-Token framework in reducing latency in Diffusion Transformers.
👉 Paper link: https://huggingface.co/papers/2606.13898
23. Seeing Before Reasoning: Decoupling Perception and Reasoning for Shortcut-Resilient Multimodal On-Policy Self-Distillation
🔑 Keywords: ViGOS, multimodal large language models, on-policy self-distillation, image-grounded behavior, privileged reasoning teacher
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To enhance image-grounded behavior in multimodal large language models through a visually grounded on-policy self-distillation framework.
🛠️ Research Methods:
– Deployment of specialized teachers at different stages: an image-only perception teacher for valid rollouts, a privileged reasoning teacher for final reasoning, and a reference teacher for invalid rollouts.
💬 Research Conclusions:
– ViGOS framework maintains the main benefits of on-policy self-distillation while improving image-grounded behavior in settings prone to shortcuts, specifically across benchmarks like general vision-language, expert reasoning, and spatial grounding.
👉 Paper link: https://huggingface.co/papers/2606.19120
24. iOSWorld: A Benchmark for Personally Intelligent Phone Agents
🔑 Keywords: iOSWorld, persistent user identity, personalized mobile agent, native iOS simulator, vision+XML
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The study introduces iOSWorld, the first interactive native iOS simulator benchmark designed to evaluate personalized mobile agent capabilities, emphasizing persistent user identity across multiple apps.
🛠️ Research Methods:
– The benchmark comprises 133 tasks within three categories, using both vision-only and privileged vision+XML settings to evaluate computer-use models.
💬 Research Conclusions:
– iOSWorld demonstrates that privileged vision+XML access can improve model performance, showing a 26 percentage point increase in frontier models, while smaller models do not benefit from additional accessibility input. The open-source release includes apps, data, tasks, rubrics, and evaluation code.
👉 Paper link: https://huggingface.co/papers/2606.09764
25. MyPCBench: A Benchmark for Personally Intelligent Computer-Use Agents
🔑 Keywords: MyPCBench, computer-use agents, personal assistants, web applications, Claude Opus 4.6
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The study introduces MyPCBench, an evaluation platform designed to test computer-use agents as personal assistants in a Linux desktop environment using real-world web applications.
🛠️ Research Methods:
– The research involved benchmarking six models, including both closed and open-weight, against 184 tasks inspired by real requests, within a simulated environment themed around the character Michael Scott from “The Office.”
💬 Research Conclusions:
– Claude Opus 4.6 emerged as the top-performing model with a 55.4% task completion rate. The model, however, encountered challenges with tasks requiring coordination across multiple applications and handling extended trajectories.
👉 Paper link: https://huggingface.co/papers/2606.16748
26. Externalizing Research Synthesis and Validation in AI Scientists through a Research Harness
🔑 Keywords: transparent AI, accountable AI, research process, traceable trajectories, AI scientists
💡 Category: AI Systems and Tools
🌟 Research Objective:
– To create persistent artifacts that track the complete AI-driven research process, ensuring transparency and accountability.
🛠️ Research Methods:
– Introduction of Xcientist to manage research synthesis and experimental validation into inspectable, contract-governed processes.
💬 Research Conclusions:
– Xcientist preserves traceable trajectories, suggesting AI scientists’ evaluation should consider the attributability and inspectability of their processes alongside the final artifacts.
👉 Paper link: https://huggingface.co/papers/2606.18874
27. Learning User Simulators with Turing Rewards
🔑 Keywords: Reinforcement Learning, Turing Test, Large Language Model, User Simulator, Indistinguishability
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The study aims to advance agent assistants, personalization systems, and social sciences research by simulating human users in interactive settings using a Turing-Test-based reinforcement learning approach.
🛠️ Research Methods:
– A novel approach named Turing-RL is proposed, which employs a discriminative Turing reward with a large language model judge to train user simulators to generate responses indistinguishable from real users.
💬 Research Conclusions:
– Turing-RL consistently outperforms baseline methods in both large language model and human evaluation metrics across conversational chat and Reddit forum discussion domains. Optimizing for indistinguishability is shown to be more effective than traditional response matching techniques.
👉 Paper link: https://huggingface.co/papers/2606.19336
28. RODS: Reward-Driven Online Data Synthesis for Multi-Turn Tool-Use Agents
🔑 Keywords: Sample depletion, Multi-turn tool-use RL, Reward variance, RODS, Policy gradients
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The study introduces RODS to dynamically synthesize new data in multi-turn tool-use reinforcement learning, addressing the issue of sample depletion by leveraging reward variance.
🛠️ Research Methods:
– Utilized a skill-aligned resampling pipeline to generate new multi-turn variants and a dynamic replay buffer that evolves with the policy to maintain an active training pool.
💬 Research Conclusions:
– RODS achieves similar performance to a much larger offline pipeline while using significantly fewer trajectories, improving over fixed-data RL and environment augmentation in controlled settings.
👉 Paper link: https://huggingface.co/papers/2606.19047
29. PAIWorld: A 3D-Consistent World Foundation Model for Robotic Manipulation
🔑 Keywords: PAIWorld, diffusion-transformer, multi-view 3D consistency, geometric awareness, robotic manipulation
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The objective of the research is to improve multi-view 3D consistency in robotic manipulation tasks by integrating geometric awareness and cross-view attention within diffusion-transformer world models.
🛠️ Research Methods:
– PAIWorld is developed with three key components: Geometry-Aware Cross-View Attention blocks, Geometric Rotary Position Embedding, and Latent 3D-REPA, enhancing diffusion-transformer models to ensure inter-view communication and 3D geometric reasoning.
💬 Research Conclusions:
– PAIWorld achieves state-of-the-art performance in multi-view 3D consistency, ranking 1st on the WorldArena leaderboard and 2nd on the AgiBot-Challenge2026 leaderboard, enabling advancements in model-based planning and multi-view policy post-training.
👉 Paper link: https://huggingface.co/papers/2606.18375
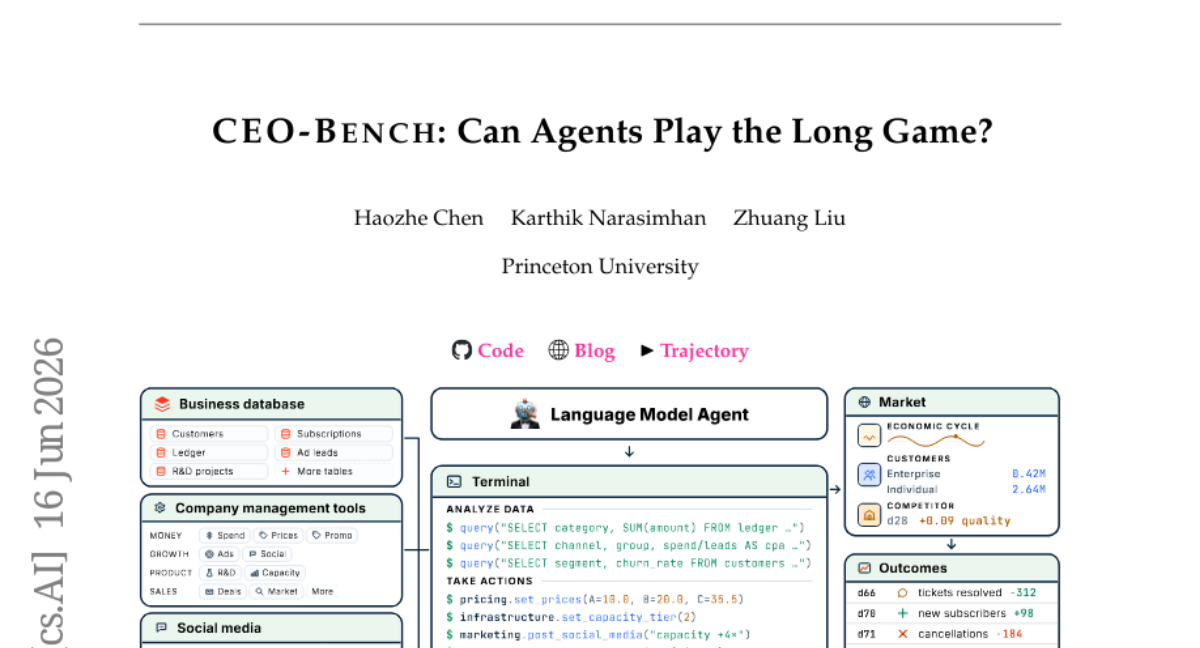
30. CEO-Bench: Can Agents Play the Long Game?
🔑 Keywords: Language model agents, long horizons, uncertainty, adaptive progress, multi-task coordination
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The objective is to assess language model agents’ proficiency in managing a simulated startup over an extended period, focusing on their abilities in long-term planning, noise handling, adaptability, and multi-task coordination.
🛠️ Research Methods:
– CEO-Bench is developed as a benchmarking tool using a programmable Python interface to evaluate these agents. The simulation involves managing various startup tasks for 500 days, testing agents in complex and dynamic environments akin to human CEOs.
💬 Research Conclusions:
– Current state-of-the-art models struggle in this simulated environment, highlighting the gap in adaptive and multi-task coordination skills. Only Claude Opus 4.8 and GPT-5.5 manage to improve beyond the initial balance, yet fail to consistently profit, signaling room for advancement in AI agent capabilities.
👉 Paper link: https://huggingface.co/papers/2606.18543
31. MaineCoon: Pursuing A Real-Time Audio-Visual Social World Model
🔑 Keywords: Real-time audio-visual autoregressive model, Social-interactive applications, Self-resampling, Cross-modal representation alignment, Reinforced online-policy distillation
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– Introduce MaineCoon, a groundbreaking model for generating real-time audio-visual content specifically optimized for social worlds and interactive applications.
🛠️ Research Methods:
– Employed novel training techniques like self-resampling and cross-modal representation alignment to optimize real-time streaming generation.
– Developed a unique agentic streaming inference framework for enhanced performance and long-horizon generation.
💬 Research Conclusions:
– MaineCoon sets a new benchmark for high-quality, low-latency audio-visual autoregressive models, indicating a shift towards AI-native social platforms.
👉 Paper link: https://huggingface.co/papers/2606.17800
32. Sumi: Open Uniform Diffusion Language Model from Scratch
🔑 Keywords: Diffusion models, Uniform diffusion language models, Knowledge and reasoning tasks, Sumi, Model weights
💡 Category: Generative Models
🌟 Research Objective:
– To introduce Sumi, a 7 billion parameter uniform diffusion language model, pretrained from scratch on 1.5 trillion tokens, to provide a benchmark for studying scaling behavior and trade-offs against autoregressive and masked diffusion models.
🛠️ Research Methods:
– Pretraining a large-scale uniform diffusion language model from scratch and releasing the model weights and training recipe for community access.
💬 Research Conclusions:
– The Sumi model shows competitive performance on knowledge, reasoning, and coding benchmarks compared to autoregressive models but underperforms on commonsense benchmarks, attributed to the education-heavy data mixture.
👉 Paper link: https://huggingface.co/papers/2606.19005
33. From Trainee to Trainer: LLM-Designed Training Environment for RL with Multi-Agent Reasoning
🔑 Keywords: Environment Redesign, Reinforcement Learning, LLM-as-Environment-Engineer, Policy Learning, Failure Analysis
💡 Category: Reinforcement Learning
🌟 Research Objective:
– To automate the environment redesign process in reinforcement learning for large language models by allowing policy models to analyze failures and propose configuration changes.
🛠️ Research Methods:
– The introduction of the LLM-as-Environment-Engineer framework where policy models examine failure trajectories and contextual information for environment adjustment.
– Utilization of the MAPF-FrozenLake testbed, which offers multi-dimensional environment configurations for benchmarking.
💬 Research Conclusions:
– The proposed framework surpasses larger proprietary models and fixed environment baselines in performance, signaling the importance of integrating failure evidence and maintaining successful configurations.
– Policy learning enhances the model’s capacity to identify weaknesses, with current RL checkpoints performing better as environment engineers than the original models.
👉 Paper link: https://huggingface.co/papers/2606.17682
34. Reinforcing Dual-Path Reasoning in Spatial Vision Language Models
🔑 Keywords: Spatial VLMs, Reinforcement Learning, Language-Only Reasoning, Detect-Then-Reason, 3D geometric cues
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To develop a unified framework capable of robust spatial reasoning across a variety of tasks by leveraging both linguistic deduction and 3D geometric reasoning.
🛠️ Research Methods:
– Introduction of Dual-Path Spatial Reasoning via Reinforcement Learning (SR-REAL) which integrates two reasoning paths—Language-Only Reasoning (LOR) and Detect-Then-Reason (DTR), utilizing supervised fine-tuning and reinforcement learning optimization.
💬 Research Conclusions:
– SR-REAL significantly outperforms existing spatial VLM baselines by supporting both reasoning paths and facilitating positive transfer between them, without requiring per-task tuning.
👉 Paper link: https://huggingface.co/papers/2606.17539
35. EfficientRollout: System-Aware Self-Speculative Decoding for RL Rollouts
🔑 Keywords: EfficientRollout, Reinforcement Learning, Speculative Decoding, Self-Speculative Decoding, Rollout Latency
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The study introduces EfficientRollout, a framework aimed at accelerating reinforcement learning rollouts by adapting drafters to evolving policies and optimizing the speculative decoding process.
🛠️ Research Methods:
– The framework utilizes a quantized drafter induced from the target model, without requiring separate drafter pretraining or online adaptation, and implements a system-aware toggle policy for speculative decoding.
💬 Research Conclusions:
– EfficientRollout significantly reduces rollout and end-to-end latency by up to 19.6% and 12.7%, respectively, compared to an accelerated autoregressive rollout baseline, while maintaining the quality of the final model.
👉 Paper link: https://huggingface.co/papers/2606.18967
36. Guava: An Effective and Universal Harness for Embodied Manipulation
🔑 Keywords: embodied tool use, high-level reasoning, semantic action abstractions, multimodal observations, iterative perception-reasoning-action loops
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The study aims to develop Guava, a harness framework for embodied tool use that combines high-level reasoning with external modules to enhance embodied manipulation capabilities in agents.
🛠️ Research Methods:
– Systematic exploration of different agent workflows, action spaces, and observation spaces, followed by the development of an end-to-end training pipeline using a 4B open-source model with fewer than 2K simulation trajectories.
💬 Research Conclusions:
– The results demonstrate that well-designed harnesses can enable compact models to perform complex tasks with minimal training data and strong generalization capabilities, comparable to advanced proprietary models.
👉 Paper link: https://huggingface.co/papers/2606.18363
37. MolmoMotion: Forecasting Point Trajectories in 3D with Language Instruction
🔑 Keywords: Motion forecasting, 3D point trajectories, robot manipulation, generative models, language description
💡 Category: Computer Vision
🌟 Research Objective:
– The paper aims to predict object trajectories from visual history and language goals, demonstrating superior performance on benchmarks and applications in robot manipulation and video generation.
🛠️ Research Methods:
– The authors formalize a goal-conditioned 3D point motion forecasting task using a large corpus of action-described, object-grounded 3D point trajectories and a new benchmark called PointMotionBench.
– They introduce MolmoMotion, a general motion forecasting model supporting autoregressive coordinate prediction and flow-matching-based trajectory generation.
💬 Research Conclusions:
– MolmoMotion outperforms existing baselines in predicting diverse motion patterns with language instructions and enhances training efficiency and generalization in robot manipulation tasks.
– The predicted trajectories effectively guide generative models to synthesize videos with more realistic object motion.
👉 Paper link: https://huggingface.co/papers/2606.18558