AI Native Daily Paper Digest – 20260619
1. Moebius: 0.2B Lightweight Image Inpainting Framework with 10B-Level Performance
🔑 Keywords: Lightweight Inpainting, Local-Global Interaction, Adaptive Distillation, High-Fidelity, Efficiency
💡 Category: Computer Vision
🌟 Research Objective:
– The research introduces Moebius, a lightweight image inpainting framework aimed at achieving high-fidelity results with reduced parameters and inference time.
🛠️ Research Methods:
– Utilizes Local-λ Mix Interaction (LλMI) blocks, which integrate spatial context and global semantic priors into fixed-size matrices to optimize latent interactions.
– Employs an adaptive multi-granularity distillation strategy operating in latent space to balance gradient-based losses and achieve high-fidelity alignment.
💬 Research Conclusions:
– Moebius demonstrates superiority or parity in generation quality compared to larger industrial models, achieving over a 15-fold speed increase and using less than 2% of the parameters (0.22B vs. 11.9B), setting a new benchmark for efficiency in high-fidelity image inpainting.
👉 Paper link: https://huggingface.co/papers/2606.19195
2. Playful Agentic Robot Learning
🔑 Keywords: embodied robots, skill acquisition, self-directed play, Code-as-Policy, skill library
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The study explores how embodied robots can learn reusable skills through self-directed play and exploration, and apply these skills to downstream tasks without further training.
🛠️ Research Methods:
– The research introduces RATs (Robotics Agent Teams) to engage in play-time skill acquisition. These teams execute a cycle of proposing tasks, planning, verifying progress, diagnosing failures, and storing successful executions in a skill library.
💬 Research Conclusions:
– Experiments demonstrate that play-learned skills significantly enhance performance on downstream tasks, with notable improvements over baseline methods. These skills can also be integrated into other Code-as-Policy systems, offering improvements without additional fine-tuning.
👉 Paper link: https://huggingface.co/papers/2606.19419
3. Multi-LCB: Extending LiveCodeBench to Multiple Programming Languages
🔑 Keywords: Multi-LCB, LLMs, code generation, Python overfitting, multilingual performance
💡 Category: Generative Models
🌟 Research Objective:
– To address the limitation of LiveCodeBench by introducing Multi-LCB, a benchmark that evaluates LLMs across twelve programming languages with a focus on cross-language code generation.
🛠️ Research Methods:
– Transforming Python tasks from the LCB dataset into equivalent tasks in other languages, maintaining contamination controls and evaluation protocols.
– Systematically assessing 24 LLMs on their performance in instruction and reasoning across multiple languages.
💬 Research Conclusions:
– Multi-LCB establishes itself as a rigorous benchmark for evaluating coding capabilities across multiple programming languages.
– The study uncovers evidence of Python overfitting, language-specific contamination, and significant disparities in multilingual performance, highlighting the need for improved cross-language LLM capabilities.
👉 Paper link: https://huggingface.co/papers/2606.20517
4. FreeStyle: Free Control of Style-Content Dual-Reference Generation from Community LoRA Mining
🔑 Keywords: FreeStyle, dual-reference generation, LoRA mining, content leakage, disentanglement mechanisms
💡 Category: Generative Models
🌟 Research Objective:
– The paper aims to develop a scalable dual-reference generation framework called FreeStyle, focusing on balancing content fidelity, style alignment, and instruction following while addressing content leakage.
🛠️ Research Methods:
– Utilizes community LoRA mining to form compositional anchors for style and content and integrates a two-stage curriculum with disentanglement mechanisms to enhance dual-reference generation.
– Introduces an attention-level enrichment constraint and frequency-aware RoPE modulation to suppress style-reference and positional-correspondence-based leakage, respectively.
– Proposes a comprehensive benchmark evaluating style similarity, content preservation, aesthetics, instruction following, and leakage rejection.
💬 Research Conclusions:
– FreeStyle effectively balances style alignment, content preservation, and leakage suppression, supported by extensive experimental results.
👉 Paper link: https://huggingface.co/papers/2606.20506
5. FlowBender: Feedback-Aware Training for Self-Correcting Conditional Flows
🔑 Keywords: FlowBender, Closed-loop framework, Alignment error, Conditional diffusion, Flow models
💡 Category: Generative Models
🌟 Research Objective:
– The study introduces and evaluates FlowBender, a closed-loop framework designed to improve constraint satisfaction in diffusion and flow models through training networks that correct alignment errors using inference-time feedback.
🛠️ Research Methods:
– FlowBender uses an unguided look-ahead pass to estimate clean signals, computes task-specific deviations via forward operators, and employs a refinement pass to produce corrected outcomes. This includes gradient-based and zero-order variants for different computational settings and a prior-step shortcut for efficient sampling.
💬 Research Conclusions:
– FlowBender demonstrates superior performance over traditional supervised and guidance-based methods across tasks like image-to-image translation, restoration, and 3D mesh texturing by improving both fidelity and plausibility without compromising between the two.
👉 Paper link: https://huggingface.co/papers/2606.20404

6. ImageWAM: Do World Action Models Really Need Video Generation, or Just Image Editing?
🔑 Keywords: ImageWAM, video generation, image editing, robot control, action prediction
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– Explore if pretrained image editing models can replace video generation in world action models to enhance robot control performance and reduce computational costs.
🛠️ Research Methods:
– Develop ImageWAM, a framework utilizing pretrained image editing models for robot action prediction, eliminating the need for decoding the target frame at inference and using flow-matching action expert conditioned on denoising-derived KV caches.
💬 Research Conclusions:
– ImageWAM provides performance improvements over standard VLA baselines, reducing FLOPs to 1/6 and latency to 1/4 of video-based WAMs, evidencing image editing as an effective alternative to traditional video-based methods.
👉 Paper link: https://huggingface.co/papers/2606.19531
7. Current World Models Lack a Persistent State Core
🔑 Keywords: World models, artificial general intelligence, observability, camera motion, WRBench
💡 Category: Foundations of AI
🌟 Research Objective:
– To address the need for consistent world states in unobserved conditions, advocating for design changes that emphasize physical state stability in world models.
🛠️ Research Methods:
– Introduction of WRBench, a diagnostic benchmark that treats camera motion as an intervention on observability, analyzing the continuity and consistency in 9,600 videos across 23 models.
💬 Research Conclusions:
– Current world models fail to independently evolve world states when unobserved, highlighting the need to prioritize robustness in physical state evolution over mere appearance fidelity.
👉 Paper link: https://huggingface.co/papers/2606.20545
8. Context-Aware RL for Agentic and Multimodal LLMs
🔑 Keywords: ContextRL, reinforcement learning, long-horizon reasoning, multimodal performance, visual question answering
💡 Category: Reinforcement Learning
🌟 Research Objective:
– To enhance long-horizon reasoning and multimodal performance by using ContextRL, which is a context-aware reinforcement learning method.
🛠️ Research Methods:
– Implemented an indirect auxiliary objective that rewards context selection supporting query-answer pairs, utilizing contrastive context data in coding and visual reasoning domains.
💬 Research Conclusions:
– ContextRL outperforms standard methods with average gains of +2.2% on long-horizon benchmarks and +1.8% on visual question answering benchmarks, demonstrating that the improvements are due to the context-selection objective rather than additional data.
👉 Paper link: https://huggingface.co/papers/2606.17053
9. Thinking with Visual Grounding
🔑 Keywords: Visually Grounded Thinking, Vision-Language Models, Visual Reasoning, Box Grounding, Reinforcement Learning
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The aim is to enhance reasoning accuracy by integrating natural-language reasoning with explicit visual evidence grounding in vision-language models.
🛠️ Research Methods:
– The study introduces a scalable synthesis pipeline paired with grounding-aware reinforcement learning, incorporating points and boxes to tie intermediate reasoning to relevant visual evidence.
– A SAM3-based agent is employed to distill visual reasoning traces and derive supervision.
💬 Research Conclusions:
– Visually grounded thinking improves model performance on counting and spatial reasoning benchmarks, surpassing non-grounded models and comparable larger models within the same family.
– Both point and box grounding techniques are found to be effective, with specific benefits on respective reasoning tasks.
👉 Paper link: https://huggingface.co/papers/2606.16122
10. Freeing the Law with LOCUS: A Local Ordinance Corpus for the United States
🔑 Keywords: Legal AI, Local Ordinance Corpus, machine-readable access, ModernBERT-based classifiers
💡 Category: Knowledge Representation and Reasoning
🌟 Research Objective:
– To develop a comprehensive corpus and access layer for U.S. local ordinance codes, facilitating machine-readable legal AI research.
🛠️ Research Methods:
– Utilization of Optical Character Recognition (OCR) to convert diverse document formats into machine-readable text.
– Training of ModernBERT-based classifiers and scorers to analyze U.S. local law on various dimensions like opacity and paternalism.
💬 Research Conclusions:
– The introduction of LOCUS, a comprehensive corpus representing nearly all publicly available municipal and county ordinance codes, supports reproducibility and downstream legal AI research. It provides a machine-readable gateway to previously inaccessible local law.
👉 Paper link: https://huggingface.co/papers/2606.19334
11. HumanScale: Egocentric Human Video Can Outperform Real-Robot Data for Embodied Pretraining
🔑 Keywords: Egocentric Human Video, Embodied Foundation Models, Pretraining, Action Prediction, Data Scaling
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The study aims to evaluate the effectiveness of egocentric human video as a scalable, lower-cost, and diverse alternative to teleoperated real-robot trajectories for pretraining embodied foundation models.
🛠️ Research Methods:
– The research involves a systematic comparison of egocentric human video and teleoperated real-robot trajectories under consistent post-training and validation protocols.
💬 Research Conclusions:
– Egocentric data, with proper filtering and labeling, can substitute and even surpass real-robot data for model pretraining, achieving significant improvements in validation loss and task execution success rates.
👉 Paper link: https://huggingface.co/papers/2606.20521
12. Adaptive Volumetric Mechanical Property Fields Invariant to Resolution
🔑 Keywords: AdaVoMP, Sparse Adaptive Voxel Structure, Transformer Encoder-Decoder, Mechanical Properties, Deformable Simulations
💡 Category: Computer Vision
🌟 Research Objective:
– The objective is to predict accurate dense spatially-varying mechanical properties (Young’s modulus, Poisson’s ratio, and density) for 3D objects to improve the resolution, accuracy, and memory efficiency for digital world simulations.
🛠️ Research Methods:
– Utilization of a novel sparse adaptive voxel structure (SAV) in conjunction with a transformer encoder-decoder model to represent 3D shape materials efficiently and enhance predictions.
💬 Research Conclusions:
– AdaVoMP significantly improves the prediction of volumetric properties with better accuracy and efficiency than previous methods, enabling high-resolution complex 3D object simulations to become more realistic and computationally efficient.
👉 Paper link: https://huggingface.co/papers/2606.18231
13. Selective Synergistic Learning for Video Object-Centric Learning
🔑 Keywords: Selective Synergistic Learning, video object-centric learning, pseudo-labeling, transitive merging, error propagation
💡 Category: Computer Vision
🌟 Research Objective:
– To enhance video object-centric learning by selectively distilling reliable cues to improve object decomposition quality and robustness using Selective Synergistic Learning (SSync).
🛠️ Research Methods:
– SSync replaces exhaustive patch alignments with targeted pseudo-labeling for boundary refinement and interior denoising, incorporating transitive pseudo-label merging for spatio-temporal activation consistency.
💬 Research Conclusions:
– SSync significantly enhances object decomposition quality while being robust to slot configurations and demonstrating linear complexity improvements, offering a versatile and scalable plug-and-play module.
👉 Paper link: https://huggingface.co/papers/2606.15527
14. The Data Manifold under the Microscope
🔑 Keywords: data-manifold geometry, curvature, reach, dSprites, COIL-20
💡 Category: Foundations of AI
🌟 Research Objective:
– The paper introduces a benchmarking framework to study data-manifold geometry by enhancing datasets like dSprites and COIL-20.
🛠️ Research Methods:
– The framework includes additional transformation dimensions and dense sampling paired with finite-difference estimators for accurate estimation of curvature, reach, and volume.
💬 Research Conclusions:
– The framework serves as a comprehensive testbed and calibration environment, demonstrated through application studies assessing scaling behavior and layer-wise geometry, thereby guiding and validating future theoretical developments.
👉 Paper link: https://huggingface.co/papers/2606.15760
15. Configurable Clinical Information Extraction with Agentic RAG: What Works, What Breaks, and Why
🔑 Keywords: ACIE, agentic RAG system, Clinical Information Extraction, patient contexts, nuclear-medicine physicians
💡 Category: AI in Healthcare
🌟 Research Objective:
– The study aims to assess the efficacy of the ACIE (Agentic Clinical Information Extraction) system in extracting medical information from complex patient contexts with high acceptance by nuclear-medicine physicians.
🛠️ Research Methods:
– Utilization of an on-premise agentic RAG pipeline to reason over complete patient contexts, grounding every answer in source passages for clinician verification.
💬 Research Conclusions:
– The ACIE system demonstrated a 96.5% acceptance rate among nuclear-medicine physicians across 7,326 judgments, successfully overcoming challenges associated with standard retrieval-augmented generation such as temporal reasoning and cross-document dependencies.
👉 Paper link: https://huggingface.co/papers/2606.19602

16. Duration Aware Scheduling for ASR Serving Under Workload Drift
🔑 Keywords: ASR, scheduling policies, E2E latency, SJF, HRRN
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The study aims to enhance ASR serving latency through duration-aware scheduling, using audio length as a proxy for processing time.
🛠️ Research Methods:
– Integration of Shortest Job First (SJF) and Highest Response Ratio Next (HRRN) scheduling algorithms into the vLLM framework, with evaluations conducted on the LibriSpeech dataset under realistic and drifted workloads.
💬 Research Conclusions:
– SJF scheduling significantly reduces median E2E latency by up to 73% but increases tail latency by up to 97%. In contrast, HRRN balances the trade-off by reducing median latency by 28% and bounding tail latency degradation to 24%, showing consistent performance without throughput penalties.
👉 Paper link: https://huggingface.co/papers/2603.11273
17. LooseControlVideo: Directorial Video Control using Spatial Blocking
🔑 Keywords: LooseControlVideo, 3D spatial control, text-to-video generation, semantic layout, trajectory accuracy
💡 Category: Generative Models
🌟 Research Objective:
– To enable intuitive 3D spatial control in text-to-video generation using sparse oriented 3D boxes, improving trajectory accuracy and occlusion handling.
🛠️ Research Methods:
– Utilization of sparse, oriented 3D boxes as proxies with a video generative model and fine-tuning a Wan 2.2 backbone on a video dataset annotated with DNOCS. The method allows localized refinements with minimal disruption.
💬 Research Conclusions:
– LooseControlVideo significantly outperforms existing baselines, demonstrating improvements in Trajectory Error, Rigid Motion Consistency, and Occlusion Accuracy over current state-of-the-art models.
👉 Paper link: https://huggingface.co/papers/2606.19495
18.

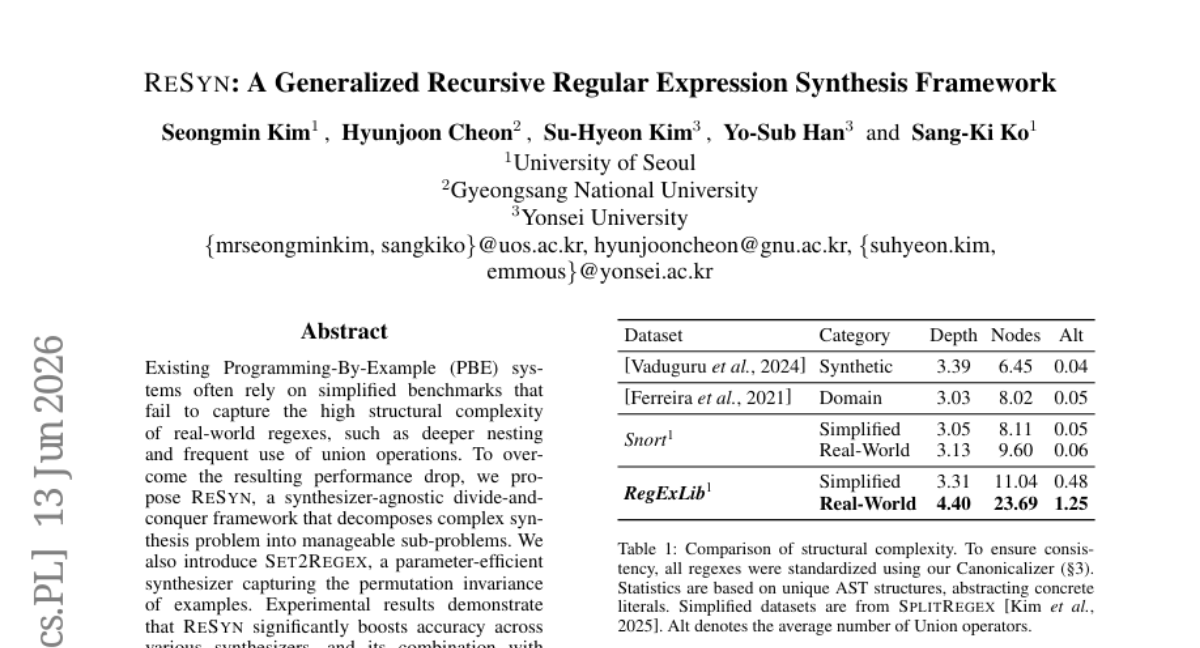
19. ReSyn: A Generalized Recursive Regular Expression Synthesis Framework
🔑 Keywords: ReSyn, Set2Regex, Programming-By-Example, divide-and-conquer framework, parameter-efficient synthesizer
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The research aims to enhance regex synthesis accuracy by using a divide-and-conquer framework called ReSyn, which effectively breaks down complex synthesis problems.
🛠️ Research Methods:
– The authors implemented a synthesizer-agnostic framework, ReSyn, and introduced Set2Regex to handle the permutation invariance of examples efficiently.
💬 Research Conclusions:
– ReSyn, when combined with Set2Regex, significantly improves accuracy across different synthesizers and sets a new state-of-the-art on challenging real-world benchmarks.
👉 Paper link: https://huggingface.co/papers/2603.24624
20. No Resource, No Benchmarks, No Problem? Evaluating and Improving LLMs for Code Generation in No-Resource Languages
🔑 Keywords: code generation, no-resource languages, benchmarks, pre-training, instruction-following
💡 Category: Generative Models
🌟 Research Objective:
– Address code generation challenges for no-resource programming languages by creating benchmarks and developing cost-effective methods for specialized instruction-following models.
🛠️ Research Methods:
– Combined further pre-training with weight difference transfer method and experimented with prompt-based techniques on developed benchmarks.
💬 Research Conclusions:
– Significant improvements in code generation for no-resource languages can be achieved, allowing for affordable deployment of specialized models while minimizing computational costs.
👉 Paper link: https://huggingface.co/papers/2606.16827
21. JAMER: Project-Level Code Framework Dataset and Benchmark on Professional Game Engines
🔑 Keywords: Game Jam, AI-driven game development, Godot engine, JamSet, JamBench
💡 Category: AI Systems and Tools
🌟 Research Objective:
– To evaluate code generation and project-level programming capabilities in AI-driven game development using frameworks and benchmarks obtained from Game Jam competitions.
🛠️ Research Methods:
– Development of JamSet and JamBench using the Godot engine to design a deterministic verification pipeline and collect runtime behavior from game projects.
💬 Research Conclusions:
– Game Jam competitions provide valuable open-source projects for AI training.
– JamBench and JamSet reveal a capability cliff in AI models as project size increases.
– Architectural design, not syntactic correctness, is identified as the bottleneck in improving runtime behavioral quality.
👉 Paper link: https://huggingface.co/papers/2606.19830
22. LegalHalluLens: Typed Hallucination Auditing and Calibrated Multi-Agent Debate for Trustworthy Legal AI
🔑 Keywords: LegalHalluLens, AI systems, hallucinations, Risk Direction Index, multi-agent debate
💡 Category: AI Systems and Tools
🌟 Research Objective:
– To audit AI systems in legal workflows by identifying specific error patterns and directional biases, enabling more reliable deployment.
🛠️ Research Methods:
– Utilized a three-component auditing framework including typed hallucination profiles, a Risk Direction Index, and a typed debate pipeline.
– Conducted experiments across 510 contracts and 249,252 clause-level instances to identify disparities in error distribution.
💬 Research Conclusions:
– The study reveals that aggregate metrics often conceal specific error concentrations and directions.
– The proposed framework substantially reduces fabricated detections and supports direction-aware procurement and agent design in legal AI systems.
👉 Paper link: https://huggingface.co/papers/2606.18021
23. Rethinking Shrinkage Bias in LLM FP4 Pretraining: Geometric Origin, Systemic Impact, and UFP4 Recipe
🔑 Keywords: FP4 training, Shrinkage Bias, Random Hadamard Transform, quantization quality, E2M1
💡 Category: Natural Language Processing
🌟 Research Objective:
– The objective is to demonstrate that uniform 4-bit training with RHT-based quantization improves training stability and performance of large language models over E2M1-based methods.
🛠️ Research Methods:
– The study identifies the shrinkage bias in non-uniform formats like E2M1 and proposes a new UFP4 recipe leveraging RHT to enhance quantization quality and minimize training instability.
💬 Research Conclusions:
– UFP4 consistently achieves lower BF16-relative loss degradation compared to E2M1-based baselines, suggesting future accelerators should adopt E1M2/INT4-style uniform 4-bit grids for training.
👉 Paper link: https://huggingface.co/papers/2606.20381
24. Taylor-Calibrate: Principled Initialization for Hybrid Linear Attention Distillation
🔑 Keywords: Hybrid linear attention models, teacher attention statistics, Gated DeltaNet, Taylor-Calibrate
💡 Category: Foundations of AI
🌟 Research Objective:
– The study aims to improve hybrid linear attention models by introducing a novel initialization technique that enhances the conversion from pretrained Transformers.
🛠️ Research Methods:
– The proposed method, Taylor-Calibrate, utilizes teacher attention statistics to set key parameters and applies alignment steps to align converted layers with the teacher output.
💬 Research Conclusions:
– Taylor-Calibrate significantly strengthens zero-shot student models with up to an 88x improvement in a representative ablation and reduces required training tokens by 4.9x–9.2x compared to naive conversion.
👉 Paper link: https://huggingface.co/papers/2606.16429
25. The FID Lottery: Quantifying Hidden Randomness in Generative-Model Evaluation
🔑 Keywords: FID, image generation, reproducibility, classifier-free-guidance, error bars
💡 Category: Generative Models
🌟 Research Objective:
– Explore reproducibility issues in image generation evaluation using FID and propose updated evaluation protocols.
🛠️ Research Methods:
– Analyzed FID variance across different training and sampling seeds, using several hundred SiT networks trained on class-conditional ImageNet 256×256.
💬 Research Conclusions:
– Retraining with a different seed causes 3.2x more variation in FID than resampling.
– Factors such as random initialization, data ordering, and Gaussian noise affect this variance.
– Increasing computational resources does not significantly reduce FID variation.
– Tuning per-cell classifier-free-guidance can reduce FID spread but affects the effectiveness of seeds.
– Recommends evaluating FID with per-cell optimal guidance and reporting an error bar over several training seeds.
👉 Paper link: https://huggingface.co/papers/2606.20536
26. Holo-World: Unified Camera, Object and Weather Control for Video World Model
🔑 Keywords: unified video generation, single image, weather transfer, camera control, scene structure
💡 Category: Generative Models
🌟 Research Objective:
– To develop a unified controllable video world model that can generate videos from a single image, preserving scene structure while allowing transition to different weather states.
🛠️ Research Methods:
– Utilization of HoloStateData for creating a state video dataset and the introduction of Holo-World, a model that jointly controls scenes from a single image through parameter subspace factorization.
💬 Research Conclusions:
– The Holo-World model effectively maintains camera and object control, enables diverse weather state transitions, and surpasses existing video-to-video weather editing benchmarks in both quantitative and qualitative assessments.
👉 Paper link: https://huggingface.co/papers/2606.20083
27. LedgerAgent: Structured State for Policy-Adherent Tool-Calling Agents
🔑 Keywords: LEDGERAGENT, tool-calling agents, task states, domain policies, ledger
💡 Category: AI Systems and Tools
🌟 Research Objective:
– To improve policy adherence and state management for tool-calling agents in customer service by maintaining task states in a separate ledger.
🛠️ Research Methods:
– Introducing LedgerAgent, an inference-time method that maintains observed task states in a separate ledger, rendering these states into the prompt and checking policy constraints before tool calls.
💬 Research Conclusions:
– LedgerAgent significantly improves average performance over standard prompt-based tool-calling approaches, especially under stricter consistency metrics, across different customer-service domains.
👉 Paper link: https://huggingface.co/papers/2606.20529
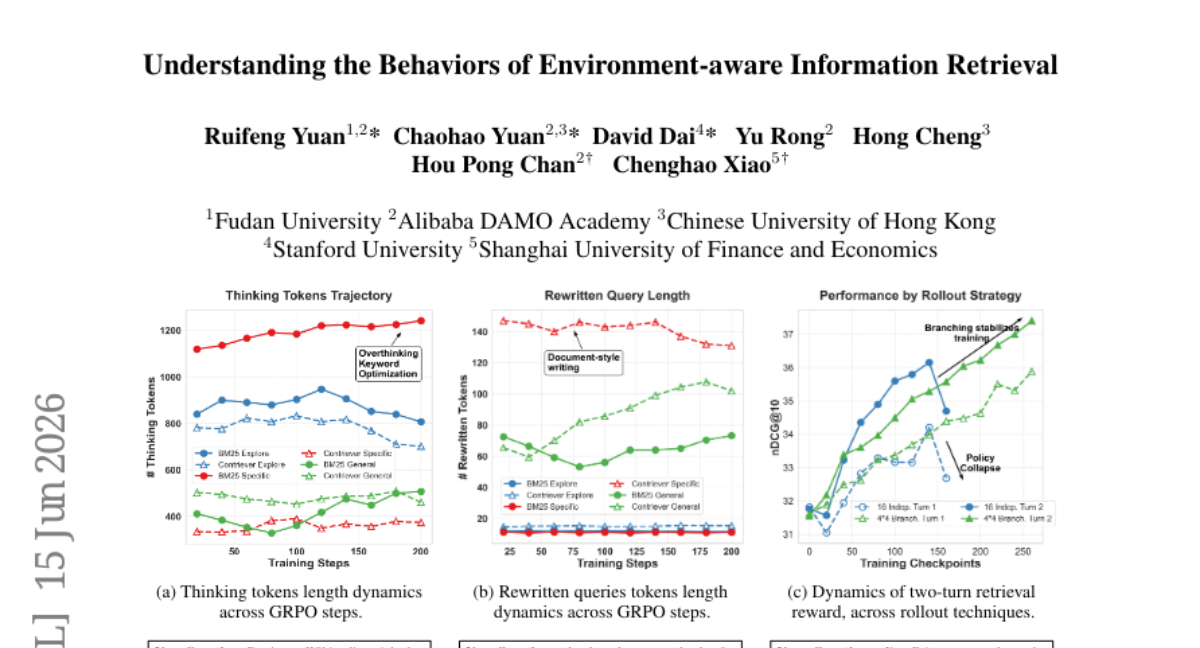
28. Understanding the Behaviors of Environment-aware Information Retrieval
🔑 Keywords: Large Language Models, Reinforcement Learning, retriever-specific guidance, retrieval-augmented generation, query formulation strategies
💡 Category: Natural Language Processing
🌟 Research Objective:
– The study systematically analyzes how Large Language Models (LLMs) can learn to adapt their query formulation strategies for different retrievers through Reinforcement Learning.
🛠️ Research Methods:
– Employs reinforcement learning to teach LLMs to tailor queries to different retriever characteristics.
– Introduces a branching-based rollout technique to enhance training stability for multi-retrieval-step trajectories.
💬 Research Conclusions:
– The research indicates that different retrievers require fundamentally distinct query styles, and tailing strategies for one retriever may not be effective for another.
– Performance is enhanced by incorporating retriever-specific human guidance and model scaling.
– Provides empirical evidence and insights for constructing retriever-aware retrieval-augmented generation systems.
👉 Paper link: https://huggingface.co/papers/2606.16817
29. FAPO: Fully Autonomous Prompt Optimization of Multi-Step LLM Pipelines
🔑 Keywords: FAPO, LLM pipelines, prompt optimization, pipeline optimization, security tasks
💡 Category: AI Systems and Tools
🌟 Research Objective:
– Introducing FAPO, a framework designed to optimize LLM pipelines by combining prompt editing with structural changes to improve performance in benchmarks and security tasks.
🛠️ Research Methods:
– Evaluating pipeline performance, inspecting intermediate steps, diagnosing failures, proposing changes, and validating optimized variants against a scoring function.
💬 Research Conclusions:
– FAPO demonstrates superior performance over baseline models in multiple benchmarks, including a significant mean gain in performance for security tasks, positioning it as a state-of-the-art pipeline optimization technique.
👉 Paper link: https://huggingface.co/papers/2606.19605
30. ENPIRE: Agentic Robot Policy Self-Improvement in the Real World
🔑 Keywords: ENPIRE, autonomous robotics, policy improvement, coding agents, dexterous manipulation
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– To automate policy improvement in autonomous robotics research through a closed-loop system, thereby minimizing human supervision and advancing real-world robotic manipulation.
🛠️ Research Methods:
– The introduction of the ENPIRE framework with four core modules: Environment, Policy Improvement, Rollout, and Evolution, enabling coding agents to autonomously refine policies via a physical feedback loop.
💬 Research Conclusions:
– ENPIRE allows coding agents to achieve a high success rate in dexterous manipulation tasks, demonstrating a practical path for deploying autonomous robotics systems effectively in the physical world.
👉 Paper link: https://huggingface.co/papers/2606.19980
31. DF3DV-1K: A Large-Scale Dataset and Benchmark for Distractor-Free Novel View Synthesis
🔑 Keywords: Radiance Fields, Distractor-free, DF3DV-1K, Photorealistic view synthesis, 2D Enhancer
💡 Category: Computer Vision
🌟 Research Objective:
– Introduction of a large-scale real-world dataset, DF3DV-1K, to enhance research on distractor-free Radiance Fields with 1,048 scenes and 89,924 images.
🛠️ Research Methods:
– Development of the DF3DV-1K dataset to create benchmarks for nine recent distractor-free radiance field methods and 3D Gaussian Splatting.
– Fine-tuning a diffusion-based 2D enhancer to improve radiance field methods, resulting in average improvements in PSNR and LPIPS metrics.
💬 Research Conclusions:
– DF3DV-1K provides clean and cluttered images across 128 distractor types and 161 scene themes, enabling comprehensive benchmarking.
– Fine-tuned diffusion-based 2D enhancer demonstrated notable improvements when used with DF3DV-1K, setting a new standard for distractor-free radiance field research.
👉 Paper link: https://huggingface.co/papers/2604.13416
32. JanusMesh: Fast and Zero-Shot 3D Visual Illusion Generation via Cross-Space Denoising
🔑 Keywords: 3D visual illusions, cross-space dual-branch denoising, view-conditioned texture synthesis, geometric fusion, semantic coherence
💡 Category: Generative Models
🌟 Research Objective:
– The primary aim is to develop a fast and training-free framework to generate text-driven 3D visual illusions that are geometrically coherent and semantically accurate from varying viewing angles.
🛠️ Research Methods:
– The framework is decoupled into two stages: cross-space dual-branch denoising for seamless geometric fusion using CLIP-guided orientation alignment and Signed Distance Field blending; and view-conditioned texture synthesis for projecting view-specific 2D diffusion priors on the geometry.
💬 Research Conclusions:
– This innovative approach produces highly realistic dual-semantic 3D illusions in a short time frame of 3-5 minutes, outperforming existing methods in geometric integrity, semantic recognizability, and efficiency.
👉 Paper link: https://huggingface.co/papers/2606.20563
33. Beyond Static Leaderboards: Predictive Validity for the Evaluation of LLM Agents
🔑 Keywords: Deployment-Relevant Dimensions, Agent Benchmarks, Rank Instability, Predictive Validity, Out-of-Distribution Criteria
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The study aims to address the limitations of aggregate-score leaderboards in agent benchmarks by proposing new evaluation frameworks based on predictive validity and out-of-distribution criteria.
🛠️ Research Methods:
– Conducted the largest in-depth examination of an MCP-based industrial-agent benchmark, entailing fourteen parallel studies across diverse dimensions such as new asset classes, orchestrations, retrieval strategies, reasoning modes, and infrastructure optimizations.
💬 Research Conclusions:
– Aggregate-score leaderboards do not effectively transfer to out-of-distribution settings and show instability in rankings.
– The research suggests a twelve-tier measurement system that highlights deployment-relevant dimensions.
– Proposed ranking methodologies prioritize predictive validity, with some existing evidence supporting this approach, although more robust confirmation is needed.
– The paper presents a pre-registered pilot design for the evolution of training-agent benchmarks.
👉 Paper link: https://huggingface.co/papers/2606.19704
34. S-Agent: Spatial Tool-Use Elicits Reasoning for Spatial Intelligence
🔑 Keywords: S-Agent, spatial reasoning, visual language models, temporal memory, hierarchical spatial tools
💡 Category: Knowledge Representation and Reasoning
🌟 Research Objective:
– To enhance visual language models with temporal memory and hierarchical spatial tools, enabling continuous 3D world understanding from multi-view imagery.
🛠️ Research Methods:
– Implementing S-Agent, a framework that uses spatial reasoning as spatio-temporal evidence accumulation and integrates a hierarchy of spatial tools and temporal memory mechanisms.
💬 Research Conclusions:
– S-Agent improves both open-source and closed-source visual language models in a training-free manner and its fine-tuned version, S-Agent-8B, surpasses similar-scale baselines, demonstrating its efficacy in spatial reasoning tasks.
👉 Paper link: https://huggingface.co/papers/2606.20515
35. DragMesh-2: Physically Plausible Dexterous Hand-Object Interaction with Articulated Objects
🔑 Keywords: DragMesh-2, PICA, dexterous hand-object interaction, articulated objects, robustness
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– To enhance dexterous hand-object interaction with articulated objects through contact-driven manipulation using DragMesh-2, and improve robustness under varying contact loads without tactile feedback using PICA.
🛠️ Research Methods:
– Implementation of DragMesh-2 for hand-driven dexterous hand-object interaction with articulated objects.
– Development of PICA, a contact-aware training mechanism that incorporates physical signals into policy learning to handle changing contact loads.
💬 Research Conclusions:
– DragMesh-2 demonstrated stronger robustness under contact-load variation compared to other methods across different damping conditions, while maintaining high task success.
– The approach provides resources for future loco-manipulation and humanoid hand-object interaction research.
👉 Paper link: https://huggingface.co/papers/2606.15133