AI Native Daily Paper Digest – 20260629
1. PhysisForcing: Physics Reinforced World Simulator for Robotic Manipulation
🔑 Keywords: PhysisForcing, Video Generation Models, Physical Consistency, DiT Features, Robotic Manipulation
💡 Category: Generative Models
🌟 Research Objective:
– The objective is to enhance embodied video generation by ensuring physical consistency through PhysisForcing, a scalable framework that integrates pixel-level trajectory alignment and semantic-level relational alignment.
🛠️ Research Methods:
– The study involves applying the PhysisForcing framework using a DiT-based approach. It employs pixel-level trajectory alignment loss and semantic-level relational alignment loss on datasets R-Bench, PAI-Bench, and EZS-Bench to strengthen physical consistency.
💬 Research Conclusions:
– PhysisForcing improves video generation models significantly, yielding better performance in robot-object interaction. It increases closed-loop success rates in the WorldArena action-planner protocol, leading to stronger representations for robotic manipulation.
👉 Paper link: https://huggingface.co/papers/2606.28128
2. Translation as a Bridging Action: Transferring Manipulation Skills from Humans to Robots
🔑 Keywords: Human manipulation skills, bridging action representation, vision-language-action model, relative wrist translation, parallel grippers
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– To investigate the transfer of human manipulation skills to bi-manual robots using a bridging action representation and a vision-language-action model.
🛠️ Research Methods:
– Implemented a bridging action representation based on relative wrist translation within the initial head-camera frame.
– Developed a π_0-like vision-language-action model with interleaved action tokens and attention masking.
💬 Research Conclusions:
– The proposed approach effectively transfers human manipulation knowledge to robots, outperforming traditional methods that rely on noisy 6DoF human actions and scales with increasing human data.
👉 Paper link: https://huggingface.co/papers/2606.28133
3. MultiHashFormer: Hash-based Generative Language Models
🔑 Keywords: MultiHashFormer, hash-based autoregression, Transformer, multilingual vocabulary expansion, parameter efficiency
💡 Category: Natural Language Processing
🌟 Research Objective:
– The introduction of MultiHashFormer, a framework enabling hash-based autoregression in language models to enhance parameter efficiency.
🛠️ Research Methods:
– Utilization of unique hash signatures for tokens, processed through Hash Encoder and Hash Decoder within a Transformer framework, evaluated on various parameter scales.
💬 Research Conclusions:
– MultiHashFormer consistently outperforms standard Transformer LMs and efficiently manages multilingual vocabulary expansion without increasing the parameter footprint.
👉 Paper link: https://huggingface.co/papers/2606.28057
4. The Tatoxa System for Text Detoxification in Low-Resource Languages: The Case of Tatar
🔑 Keywords: Text detoxification, Tatar language, low resource languages, cross-lingual transfer, AI Native
💡 Category: Natural Language Processing
🌟 Research Objective:
– The paper introduces Tatoxa, a state-of-the-art text detoxification system specifically designed for the Tatar language, addressing the lack of attention given to low resource languages.
🛠️ Research Methods:
– Comparative experiments were conducted to demonstrate Tatoxa’s superior performance against existing LLMs, and a new dataset was introduced for fine-tuning and evaluating text detoxification in Tatar.
💬 Research Conclusions:
– Tatoxa outperforms both open source and proprietary commercial LLMs. The cross-lingual transfer from languages like Russian performs poorly compared to training on native Tatar data, highlighting the importance of native language data for low-resource settings.
👉 Paper link: https://huggingface.co/papers/2606.26015
5. ProMSA:Progressive Multimodal Search Agents for Knowledge-Based Visual Question Answering
🔑 Keywords: Knowledge-based Visual Question Answering, ProMSA, multimodal search agent, reinforcement learning, retrieval optimization
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To develop a progressive multimodal search agent (ProMSA) for Knowledge-based Visual Question Answering (KB-VQA) that adaptively selects search strategies to enhance accuracy and efficiency.
🛠️ Research Methods:
– Utilization of rejection-sampling SFT for learning valid tool-use formats.
– Optimization through TN-GSPO, a sequence-level reinforcement learning objective, which normalizes updates based on generation length and tool-interaction depth.
💬 Research Conclusions:
– ProMSA demonstrates consistent improvements over existing RAG and agent baselines on E-VQA and InfoSeek datasets, with enhanced retrieval and end-to-end accuracy.
👉 Paper link: https://huggingface.co/papers/2606.27974
6. Parallel Rollout Approximation for Pixel-Space Autoregressive Image Generation
🔑 Keywords: Parallel Rollout Approximation, pixel-space, autoregressive generation, ImageNet, FID
💡 Category: Generative Models
🌟 Research Objective:
– To improve the quality and efficiency of pixel-space autoregressive image generation by using low-dimensional intermediate states and parallel training.
🛠️ Research Methods:
– Introduced Parallel Rollout Approximation (PRA) which utilizes low-dimensional intermediate states instead of high-dimensional pixel patches.
– Implemented a pixel decoder to map intermediate states back to pixel-space tokens while retaining the pixel-in, pixel-out AR interface.
💬 Research Conclusions:
– PRA achieved a new state of the art FID score of 1.94 on class-conditional ImageNet-1K generation, surpassing previous benchmarks.
– Demonstrated higher ImageNet classification accuracy compared to other autoregressive and diffusion baselines, indicating PRA’s potential for unified pixel-space image generation and understanding.
👉 Paper link: https://huggingface.co/papers/2606.27978
7. Ko-WideSearch: A Korean Breadth-Search Benchmark for Exhaustive Set Enumeration by Web Agents
🔑 Keywords: Web-agent benchmarks, breadth-search, Ko-WideSearch, normalization-aware comparator
💡 Category: Natural Language Processing
🌟 Research Objective:
– To evaluate and highlight the limitations in breadth-search capabilities by developing a Korean web-agent benchmark that exhaustively enumerates entity memberships with attribute tables.
🛠️ Research Methods:
– The creation of Ko-WideSearch, a Korean benchmark, utilizing an automated synthesize-and-verify pipeline to test breadth-search capabilities across 228 tables, 190 entities, and 16 categories using different tiers and structural knobs like table width and composite keys.
💬 Research Conclusions:
– Web agents exhibit consistent failure in row recovery, achieving high set identification but poor Row-F1 scores, especially as difficulty increases; this gap is found to stem from challenges in finding the correct value rather than formatting it.
👉 Paper link: https://huggingface.co/papers/2606.27595
8. Vesta: A Generalist Embodied Reasoning Model
🔑 Keywords: Vesta, embodied generalist, localization, spatial reasoning, foundation model
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The objective of this research is to develop a unified embodied generalist model named Vesta, which integrates localization, spatial reasoning, navigation, and long-horizon planning into a single foundation model.
🛠️ Research Methods:
– Vesta is trained on a diverse and massive curated corpus designed for spatial grounding and utilizes a simple multimodal memory harness to facilitate reasoning over extended time horizons.
💬 Research Conclusions:
– Vesta outperforms state-of-the-art specialized models by over 20% on average in benchmark tests and by more than 10% over an ensemble of category-best baselines. In real-world robotic applications, Vesta enhances task success by more than 35%, demonstrating its effectiveness and scalability as a preferable alternative to deploying multiple specialized models.
👉 Paper link: https://huggingface.co/papers/2606.20905
9. Towards Automating Scientific Review with Google’s Paper Assistant Tool
🔑 Keywords: AI-assisted scientific review, AI-human collaboration, inference scaling, agentic AI framework
💡 Category: AI Systems and Tools
🌟 Research Objective:
– To address the challenges faced by traditional peer review systems due to the influx of AI-assisted scientific discoveries by proposing a taxonomy of AI-human collaboration levels and introducing the Paper Assistant Tool (PAT).
🛠️ Research Methods:
– PAT uses advanced inference scaling techniques to comprehensively evaluate scientific manuscripts, including checking theoretical results, validating experiments, and identifying mathematical errors.
💬 Research Conclusions:
– PAT demonstrated a 34% improvement in identifying mathematical errors over zero-shot recall in the SPOT benchmark and proved effective in pilot deployments at major Computer Science conferences, highlighting its capability to catch critical errors and suggest significant improvements in research papers.
👉 Paper link: https://huggingface.co/papers/2606.28277
10. AgentOdyssey: Open-Ended Long-Horizon Text Game Generation for Test-Time Continual Learning Agents
🔑 Keywords: test-time continual learning, open-ended text games, world knowledge acquisition, episodic memory, AI Native
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The objective is to evaluate key abilities of test-time continual learning agents, such as exploration and planning, through procedurally generated text games.
🛠️ Research Methods:
– AgentOdyssey framework uses open-ended text games to measure agents’ learning, memory, and exploration in continuous long-horizon settings.
💬 Research Conclusions:
– The study reveals limitations in agents’ capabilities and identifies short-term memory as crucial for enhancing agent performance during test-time training.
👉 Paper link: https://huggingface.co/papers/2606.24893
11. Boundary-Aware Context Grounding for A Low-Channel EEG Agent
🔑 Keywords: NeuraDock Agent, hardware-aware, EEG, large language models, data security
💡 Category: AI Systems and Tools
🌟 Research Objective:
– To introduce NeuraDock Agent, an open-source architecture combining a deterministic EEG processing engine with a hardware-aware language model interface to ensure accurate analysis and maintain local data security.
🛠️ Research Methods:
– Implementation of a numerical engine for parsing, quality control, and executing spectral workflows, while the large language model interfaces through a compact, versioned context.
– Evaluation through identical structured results over numerical repetitions and various testing scenarios, including request-capture and failure-injection experiments, and a boundary-awareness benchmark with multiple context ablations.
💬 Research Conclusions:
– The research establishes hardware- and implementation-aware grounding as a practical mechanism for calibrating EEG agent operations, but does not provide clinical validity or a validated absolute cognitive-load index.
👉 Paper link: https://huggingface.co/papers/2606.26519
12. CogniRoute: Learning to Route Social Evidence in Omni-Modal Models
🔑 Keywords: Mixture-of-Experts, cognitive schema, route-aware reinforcement learning, social video question answering, cross-modal relation
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The primary aim of the study is to enhance multimodal reasoning in social video question answering using CogniRoute, a schema-guided Mixture-of-Experts framework.
🛠️ Research Methods:
– The CogniRoute framework leverages a cognitive schema during training to factorize examples by cross-modal relation, reasoning demand, and temporal scope, utilizing global routing signatures for fine-tuning. It also applies route-aware reinforcement learning to optimize token generation and expert allocation.
💬 Research Conclusions:
– CogniRoute significantly outperforms baseline models, achieving a 59.38% average accuracy on OmniSocialBench, with notable improvements in audio-visual coordination, conflict resolution, and temporally grounded social inference.
👉 Paper link: https://huggingface.co/papers/2606.20970
13. To Run or Not to Run: Analyzing the Cost-Effectiveness of Code Execution in LLM-Based Program Repair
🔑 Keywords: LLM-based agents, program repair, execution-based approach, execution paradigms, SWE-bench
💡 Category: AI Systems and Tools
🌟 Research Objective:
– To investigate the execution behavior of LLM-based program repair agents and its impact on efficiency.
🛠️ Research Methods:
– Conducted a two-stage empirical study involving the analysis of 7,745 agent traces from SWE-bench and evaluation of 3,000 end-to-end repair attempts across multiple execution paradigms using three distinct agents.
💬 Research Conclusions:
– Execution is broadly applied across all tested agents but varies significantly in frequency and success rate.
– Execution restrictions have minimal effect on repair success while offering significant cost savings.
– Current agents often do not optimize execution costs according to its varying benefits, suggesting the need for a more strategic, cost-benefit approach to execution.
👉 Paper link: https://huggingface.co/papers/2606.26978
14. Simplified Sparse Attention via Gist Tokens
🔑 Keywords: Simplified Sparse Attention, gist tokens, Sparse attention, inference cost, retrieval-augmented generation
💡 Category: Natural Language Processing
🌟 Research Objective:
– To reduce long-context inference costs through Simplified Sparse Attention (SSA) without architectural modifications by using gist token-based attention masking during pretraining.
🛠️ Research Methods:
– The implementation of SSA involves continued pretraining with sequences interleaved with gist tokens, optimizing the next-token loss while using an attention mask to teach the model to pack important information into gist tokens. At inference time, SSA scores chunks through attention between the current query and gist tokens, selectively unfolding top-k chunks by reintroducing the corresponding raw tokens.
💬 Research Conclusions:
– SSA significantly outperforms existing compression and sparse-attention baselines on LongBench. In retrieval-augmented generation, SSA can surpass full attention after continued pretraining by over 5.7 points due to its selective unfolding capability, effectively concentrating attention on query-relevant chunks and filtering out noise. The H-SSA variant achieves log-linear decoding complexity while maintaining or improving accuracy at high compression ratios up to 32x.
👉 Paper link: https://huggingface.co/papers/2604.20920
15. Qwen-RobotNav Technical Report: A Scalable Navigation Model Designed for an Agentic Navigation System
🔑 Keywords: Qwen-RobotNav, scalable navigation model, parameterized interface, multi-task training, zero-shot generalization
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The paper introduces Qwen-RobotNav, a scalable navigation model designed to achieve state-of-the-art performance across various task modes by leveraging a parameterized interface.
🛠️ Research Methods:
– The researchers trained Qwen-RobotNav on 15.6 million samples, co-training with vision-language data to prevent the collapse observed in trajectory-only training, employing multi-task training for robustness.
💬 Research Conclusions:
– Qwen-RobotNav demonstrates new state-of-the-art results on major navigation benchmarks, exhibiting strong zero-shot generalization to real-world robotics and effective scalability from 2B to 8B parameters.
👉 Paper link: https://huggingface.co/papers/2606.18112
16.

17. How Much Static Structure Do Code Agents Need? A Study of Deterministic Anchoring
🔑 Keywords: AI Native, static analysis, deterministic anchors, code agents, structural annotations
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The study investigates the use of lightweight static analysis to enhance navigation predictability and reproducibility for code agents by providing deterministic structural anchors.
🛠️ Research Methods:
– Utilizing Codex from OpenAI, structural annotations of varying granularities were systematically injected and their impact on localization, trajectory behavior, and run-to-run stability was measured.
💬 Research Conclusions:
– Static analysis anchors aid code agents not by increasing intelligence, but by disciplining navigation.
– Anchoring improves function-level localization and shortens navigation trajectories, while being optimal when tailored to repository characteristics.
– Anchoring increases link-following rates and reduces run-to-run variability, improving reliability at moderate token costs.
👉 Paper link: https://huggingface.co/papers/2606.26979
18. The Galaxy’s Guide to the Tokenizer: A Benchmark for Scientific Foundation Models
🔑 Keywords: Tokenization, Astronomical Imaging, Transformer-Based Foundation Models, Reconstruction Fidelity, Physical Properties
💡 Category: Machine Learning
🌟 Research Objective:
– The study investigates the impact of different tokenization methods on astronomical images, focusing on reconstruction quality, physical property prediction, and morphological preservation.
🛠️ Research Methods:
– Utilizes four tokenization strategies (Affine, AIM, JetFormer, VQ-VAE) within a unified transformer framework using 640,000 galaxy images from the DESI Legacy Survey to evaluate reconstruction fidelity and physical property predictions.
💬 Research Conclusions:
– No single tokenization approach excels across all tasks; JetFormer achieves higher reconstruction quality, while VQ-VAE is superior for predicting galaxy physical properties. Affine and AIM perform better in preserving localized morphological information, indicating trade-offs among the methods.
👉 Paper link: https://huggingface.co/papers/2606.25610
19. MemoBench: Benchmarking World Modeling in Dynamically Changing Environments
🔑 Keywords: Video generation models, memory consistency, diagnostic benchmark, disappear-and-reappear paradigm, VQA-based assessment
💡 Category: Generative Models
🌟 Research Objective:
– The research aims to develop MemoBench, a diagnostic benchmark to evaluate video generation models’ memory consistency in dynamic environments where objects disappear and reappear in updated states.
🛠️ Research Methods:
– The study introduces a disappear-and-reappear paradigm and curates 360 ground-truth clips from both synthetic and real-world scenes.
– An evaluation suite is designed that combines automated metrics with a VQA-based assessment focusing on four diagnostic pillars.
💬 Research Conclusions:
– The evaluation of eight state-of-the-art models offers key insights and outlines open challenges related to memory consistency under the disappear-and-reappear paradigm.
👉 Paper link: https://huggingface.co/papers/2606.27537
20. Qwen-RobotManip Technical Report: Alignment Unlocks Scale for Robotic Manipulation Foundation Models
🔑 Keywords: Vision-Language-Action foundation model, unified alignment, large-scale multi-source training, emergent generalization capabilities, zero-shot instruction following
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The study aims to determine if scaling methodologies successful in language and multimodality can be applied to robotic manipulation to achieve genuine generalization.
🛠️ Research Methods:
– Development of the Qwen-RobotManip, a Vision-Language-Action foundation model, using a unified alignment framework across representation, motion, and behavior dimensions with large-scale multi-source data assimilation.
💬 Research Conclusions:
– Qwen-RobotManip demonstrates substantial generalization capabilities including zero-shot instruction following, robustness to perturbations, and cross-embodiment transfer, outperforming state-of-the-art models in various OOD settings and achieving top performance in RoboChallenge.
👉 Paper link: https://huggingface.co/papers/2606.17846
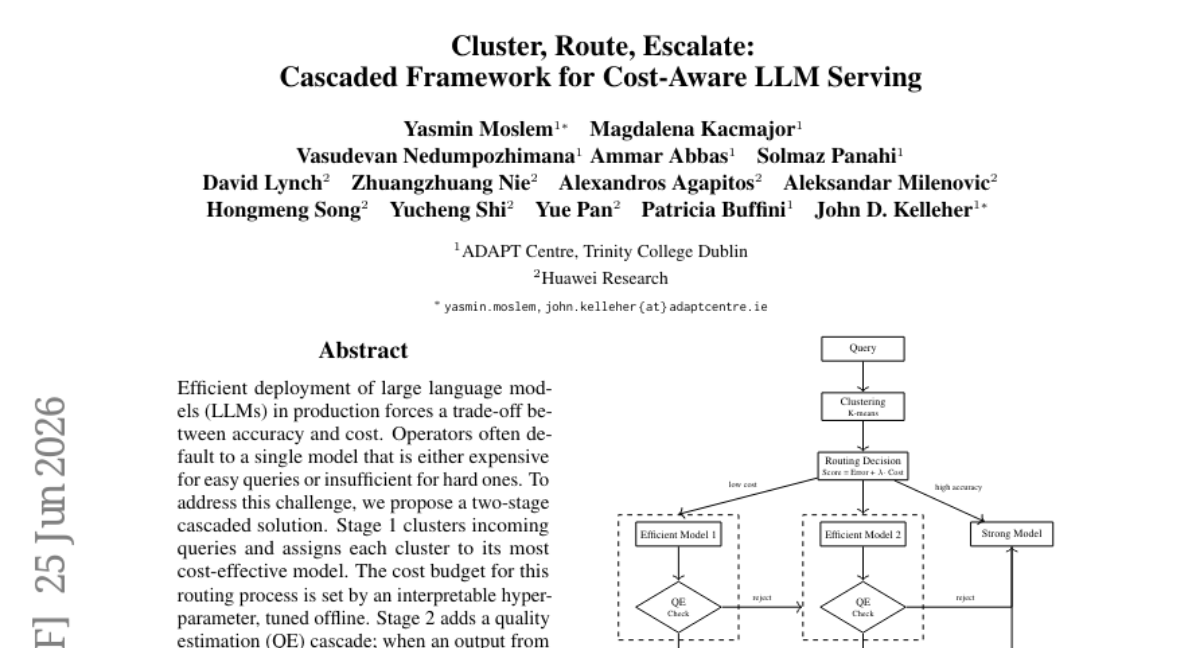
21. Cluster, Route, Escalate: Cascaded Framework for Cost-Aware LLM Serving
🔑 Keywords: Large Language Models, Cascaded Solution, Quality Estimation, Cost-Effective Model, Time Per Output Token
💡 Category: Natural Language Processing
🌟 Research Objective:
– To develop a cascaded system for deploying large language models that optimizes the balance between accuracy and cost.
🛠️ Research Methods:
– Implement a two-stage cascaded solution: first, cluster incoming queries for cost-effective model assignment; second, apply a quality estimation cascade to escalate queries to stronger models if needed.
💬 Research Conclusions:
– The proposed cascaded system maintains 97-99% accuracy of the strongest model while optimizing Time Per Output Token and adapts to model pool changes without manual reconfiguration.
👉 Paper link: https://huggingface.co/papers/2606.27457
22. Object-Centric Residual RL for Zero-Shot Sim-to-Real VLA Enhancement
🔑 Keywords: Vision-Language-Action model, Reinforcement Learning, Residual RL, sim-to-real dilemma, object-centric
💡 Category: Reinforcement Learning
🌟 Research Objective:
– To enhance the robustness of Vision-Language-Action (VLA) models in real-world applications by using a simulation-trained reinforcement learning policy.
🛠️ Research Methods:
– Introduced an object-centric residual reinforcement learning framework that trains corrective policies in simulation, incorporating object poses to bridge the sim-to-real gap.
💬 Research Conclusions:
– The proposed framework improves the success rate of real-world robotic tasks from 42% to 76% zero-shot. This methodology allows for retraining of the base VLA model for self-improvement without additional teleoperation.
👉 Paper link: https://huggingface.co/papers/2606.18953
23. NormGuard: Reward-Preserving Norm Constraints in Flow-Matching Reinforcement Learning
🔑 Keywords: Reinforcement Learning, Reward Alignment, Flow-Based Generators, Velocity Norm, Norm Inflation
💡 Category: Generative Models
🌟 Research Objective:
– To address the degradation of perceptual quality in flow-based generators by managing velocity norm inflation through training-time interventions rather than inference-time corrections.
🛠️ Research Methods:
– Identification of structural signatures of drift in post-training methods such as NFT, AWM, and DPO and the proposition of \methodname, a hinge penalty designed to activate when |v_θ| exceeds |v_{ref}|.
💬 Research Conclusions:
– \methodname improves both the MLLM-judged image quality and forensic realism while preserving reward, effectively addressing issues of norm inflation not resolved by traditional inference-time rescaling.
👉 Paper link: https://huggingface.co/papers/2606.27771
24. Thinking While Speaking: Inference-Time Knowledge Transfer for Responsive and Intelligent Conversational Voice Agents
🔑 Keywords: Conversational infill, Voice agents, Real-time models, Latency, Talker model
💡 Category: Natural Language Processing
🌟 Research Objective:
– To develop a method called conversational infill that enables small real-time models to maintain responsiveness while integrating the outputs of foundation models to enhance voice agents’ capabilities without sacrificing latency.
🛠️ Research Methods:
– Curated a synthetic dataset of 290,571 examples across six domains to train and test small language models ranging from 135M to 1.7B parameters.
– Implemented a system called ConvFill that provides immediate, contextually grounded responses and integrates streamed reasoner knowledge fluently.
💬 Research Conclusions:
– ConvFill achieves millisecond-level response times while narrowing the accuracy gap compared to foundation models by 6.3%.
– User studies indicate that ConvFill is ranked on par with frontier models and is preferred for retrieval-heavy tasks due to higher responsiveness.
👉 Paper link: https://huggingface.co/papers/2511.07397
25. Learning to Fold: prizewinning solution at LeHome Challenge 2026 (1st place online, 2nd offline)
🔑 Keywords: vision-language-action policy, reinforcement learning, garment folding, asynchronous distributed training, sim-to-real
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The paper presents a solution for the LeHome Challenge 2026, focusing on improving a vision-language-action (VLA) policy in the context of bimanual garment folding using reinforcement learning techniques.
🛠️ Research Methods:
– The study employs a shared network for success estimation, advantage calculation, and employs techniques like AWR, RECAP, and asynchronous distributed training to optimize and enhance the VLA policy execution.
– Utilizes a sim-to-real approach with tools for camera alignment, heavy augmentation, and data collection methods similar to DAgger-like human-in-the-loop strategies.
💬 Research Conclusions:
– The proposed system successfully placed 1st in simulation and 2nd in the real-world round, demonstrating the effective application and integration of reinforcement learning and optimization techniques in a competitive scenario.
👉 Paper link: https://huggingface.co/papers/2606.27163
26. SimFoundry: Modular and Automated Scene Generation for Policy Learning and Evaluation
🔑 Keywords: Zero-Shot, Real-World Robot Policy Training, Simulation Construction, Digital Twins, Affordance-Preserving Variations
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– SimFoundry aims to facilitate zero-shot real-world robot policy training by automating the construction of simulations with diverse scene variations to enhance generalization and performance prediction.
🛠️ Research Methods:
– The paper introduces a modular system called SimFoundry for zero-shot real-to-sim scene construction from video data, generating digital twins and enabling editing to create varied environments for policy training.
💬 Research Conclusions:
– Policies trained with SimFoundry data successfully transfer to complex real-world tasks, with simulations showing strong predictive accuracy for real-world performance and significant improvements in task success rates.
👉 Paper link: https://huggingface.co/papers/2606.28276
27. GBC: Gradient-Based Connections for Optimizing Multi-Agent Systems
🔑 Keywords: Gradient-Based Connections, Multi-agent systems, Large Language Models, Credit Assignment, Computational Graph
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The paper introduces Gradient-Based Connections (GBC) to improve fine-grained attribution and optimization in multi-agent systems built on large language models, addressing challenges like miscoordination and lack of precise credit assignment.
🛠️ Research Methods:
– GBC models agent interactions as a computational graph and uses gradient-based connection weights to quantify individual agent impact. An attribution graph with task-specific loss signal propagation enables error source identification and optimization.
💬 Research Conclusions:
– Experiments on MultiWOZ and τ-bench demonstrate that GBC enhances multi-agent system performance, surpassing both strong single-agent and multi-agent baselines, with better attribution quality linked to effective optimization.
👉 Paper link: https://huggingface.co/papers/2606.28187
28. SingGuard: A Policy-Adaptive Multimodal LLM Guardrail with Dynamic Reasoning
🔑 Keywords: SingGuard, Vision-language models, policy-adaptive, multimodal guardrail model, Dynamic-rule evaluation
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The study introduces SingGuard, a policy-adaptive multimodal guardrail system designed to evaluate and ensure safety in real-time multimodal conversations by dynamically applying natural-language policies.
🛠️ Research Methods:
– Utilizes a multimodal framework that balances efficiency and interpretability by supporting fast, hybrid, and slow inference regimes. The system employs fast-to-slow reasoning, leveraging fast–slow decoupled reinforcement learning for optimization.
💬 Research Conclusions:
– SingGuard demonstrates state-of-the-art performance on multimodal guardrail benchmarks, notably improving policy-following accuracy from 0.6465 to 0.7415 during runtime policy shifts, and effectively handling dynamic-rule evaluation scenarios.
👉 Paper link: https://huggingface.co/papers/2606.22873

29. Qwen-Image-2.0-RL Technical Report
🔑 Keywords: Reinforcement Learning, On-policy Distillation, Visual Quality, Instruction-following, Diffusion Model
💡 Category: Generative Models
🌟 Research Objective:
– Enhance the visual quality and instruction-following capabilities of a diffusion model for image generation and editing tasks.
🛠️ Research Methods:
– Apply reinforcement learning from human feedback (RLHF) and on-policy distillation (OPD) to develop a post-training pipeline named Qwen-Image-2.0-RL.
– Construct task-specific composite reward models by fine-tuning vision-language models with a pointwise scoring paradigm and chain-of-thought reasoning.
💬 Research Conclusions:
– Qwen-Image-2.0-RL achieved significant improvements in aesthetic quality, prompt adherence, and editing accuracy, with an overall score of 57.84 on Qwen-Image-Bench and higher Elo ratings in both text-to-image and image editing arenas compared to the base model.
👉 Paper link: https://huggingface.co/papers/2606.27608
30. Formalizing Latent Thoughts: Four Axioms of Thought Representation in LLMs
🔑 Keywords: axiomatic evaluation framework, latent thought representations, functional axioms, reasoning tasks, open-weight LLMs
💡 Category: Natural Language Processing
🌟 Research Objective:
– Introduce an axiomatic evaluation framework for assessing latent thought representations in LLMs.
🛠️ Research Methods:
– Formalize four functional axioms, applied independently of downstream accuracy, to assess representation quality across 23 reasoning tasks.
💬 Research Conclusions:
– Found systematic failures in current latent representations, failing to satisfy all axioms, regardless of LLM architecture.
– Demonstrated that representation failures are structural, not a mere outcome of model size or training procedures.
👉 Paper link: https://huggingface.co/papers/2606.27378