AI Native Daily Paper Digest – 20250630
1. BlenderFusion: 3D-Grounded Visual Editing and Generative Compositing
🔑 Keywords: BlenderFusion, diffusion model, source masking, simulated object jittering, AI-generated summary
💡 Category: Generative Models
🌟 Research Objective:
– The objective is to present BlenderFusion, a framework for generative visual compositing, enhancing scene editing and composition by synthesizing new scenes with a layering-editing-compositing pipeline.
🛠️ Research Methods:
– The research utilizes a pre-trained diffusion model extended for parallel processing of scenes and fine-tuned on video frames using source masking and simulated object jittering.
💬 Research Conclusions:
– BlenderFusion shows significant improvement over previous methods in complex compositional scene editing tasks.
👉 Paper link: https://huggingface.co/papers/2506.17450
2. LLaVA-Scissor: Token Compression with Semantic Connected Components for Video LLMs
🔑 Keywords: LLaVA-Scissor, Semantic Connected Components, token compression, video multimodal large language models
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– Introduce LLaVA-Scissor, a training-free token compression strategy tailored for video multimodal large language models, aiming to enhance semantic coverage and minimize token redundancy.
🛠️ Research Methods:
– Utilize Semantic Connected Components (SCC) to assign tokens to distinct semantic regions for comprehensive coverage, implementing a spatio-temporal token compression strategy that operates in both spatial and temporal domains.
💬 Research Conclusions:
– LLaVA-Scissor outperforms existing token compression methods in video understanding benchmarks, demonstrating superior performance, especially at low token retention ratios.
👉 Paper link: https://huggingface.co/papers/2506.21862
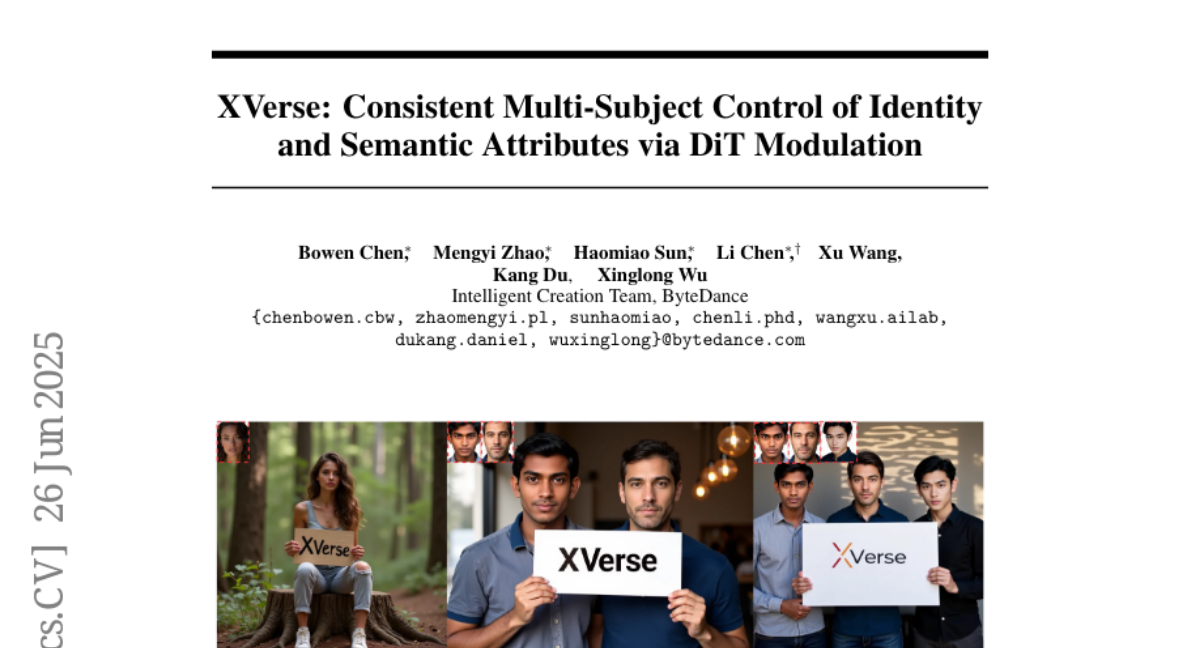
3. XVerse: Consistent Multi-Subject Control of Identity and Semantic Attributes via DiT Modulation
🔑 Keywords: AI-generated summary, text-to-image generation, Diffusion Transformers (DiTs), token-specific text-stream modulation, multi-subject image synthesis
💡 Category: Generative Models
🌟 Research Objective:
– The paper proposes the XVerse model to achieve fine-grained control over multiple subjects’ identity and semantic attributes in text-to-image generation.
🛠️ Research Methods:
– The method involves transforming reference images into offsets for token-specific text-stream modulation to allow independent control without disturbing image latents or features.
💬 Research Conclusions:
– XVerse offers high-fidelity, editable multi-subject image synthesis with robust control over individual subject characteristics, enhancing personalized and complex scene generation capabilities.
👉 Paper link: https://huggingface.co/papers/2506.21416
4. ShotBench: Expert-Level Cinematic Understanding in Vision-Language Models
🔑 Keywords: AI-driven cinematic understanding, Vision-Language Models, ShotBench, ShotQA, ShotVL
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The study aims to enhance AI’s capabilities in understanding and generating nuanced cinematic language by developing datasets and models specifically focused on cinematic language comprehension.
🛠️ Research Methods:
– Introduction of ShotBench as a benchmark with over 3.5k expert-annotated QA pairs from films.
– Evaluation of 24 Vision-Language Models to assess their limitations.
– Creation of ShotQA, a large-scale multimodal dataset with approximately 70k cinematic QA pairs.
– Development of ShotVL through supervised fine-tuning and Group Relative Policy Optimization.
💬 Research Conclusions:
– ShotVL significantly outperforms existing models on ShotBench, establishing state-of-the-art performance in AI-driven cinematic understanding and generation.
– Open-sourcing of models, data, and code to promote advancements in this area.
👉 Paper link: https://huggingface.co/papers/2506.21356
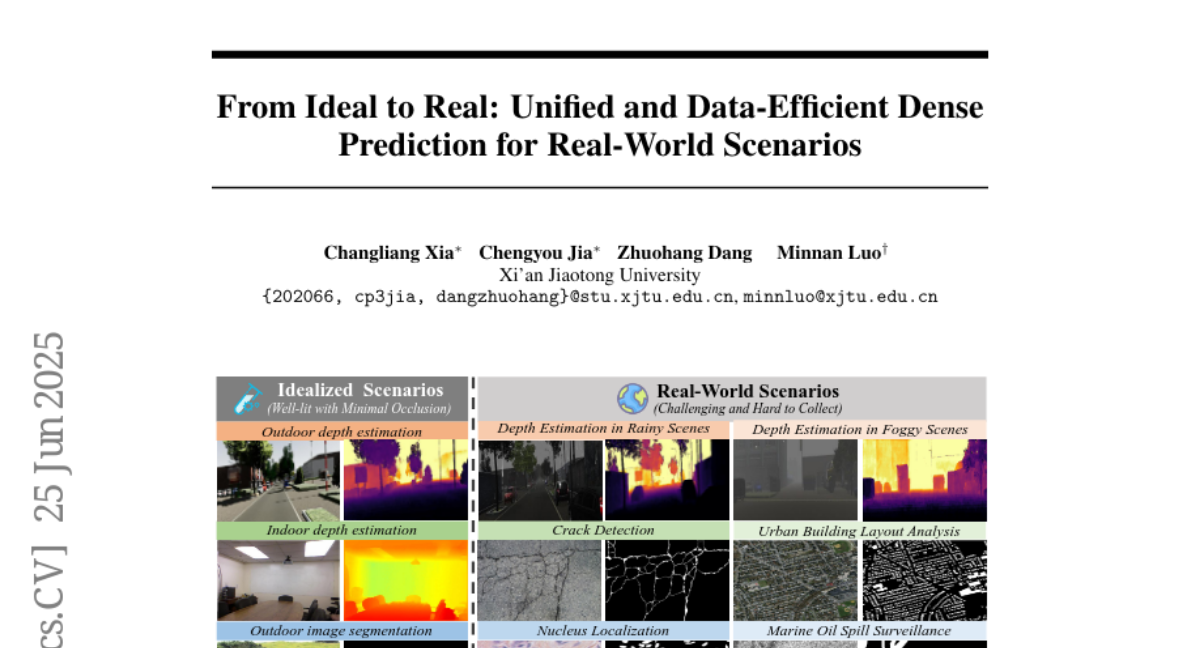
5. From Ideal to Real: Unified and Data-Efficient Dense Prediction for Real-World Scenarios
🔑 Keywords: DenseDiT, Generative Models, Dense Prediction, Computer Vision
💡 Category: Computer Vision
🌟 Research Objective:
– The study introduces DenseDiT, a generative model-based approach, aimed at enhancing performance in real-world dense prediction tasks using minimal training data.
🛠️ Research Methods:
– DenseDiT employs a parameter-reuse mechanism and two lightweight branches that integrate multi-scale context, maximizing the use of visual priors from generative models.
💬 Research Conclusions:
– DenseDiT demonstrates superior performance using less than 0.01% of the training data compared to existing methods, highlighting its efficacy and practical value for real-world deployment.
👉 Paper link: https://huggingface.co/papers/2506.20279
6. Pangu Pro MoE: Mixture of Grouped Experts for Efficient Sparsity
🔑 Keywords: Mixture of Grouped Experts, Ascend NPUs, Pangu Pro MoE, Expert Load Balancing, Sparse model
💡 Category: Natural Language Processing
🌟 Research Objective:
– To introduce and implement the Mixture of Grouped Experts (MoGE) for large language models to improve expert load balancing and execution efficiency, particularly on Ascend NPUs.
🛠️ Research Methods:
– The development of Pangu Pro MoE, a model based on MoGE with extensive system simulation studies, optimized for Ascend 300I Duo and 800I A2 NPUs, involving sparse models to enhance computational load balancing across devices.
💬 Research Conclusions:
– MoGE results in better expert load balancing and more efficient execution for model training and inference, achieving significant throughput improvements and a favorable cost-to-performance ratio, outperforming comparable Dense models.
👉 Paper link: https://huggingface.co/papers/2505.21411
7. Ark: An Open-source Python-based Framework for Robot Learning
🔑 Keywords: Robotics, AI Native, Imitation Learning, Python-first, ARK Framework
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The main objective is to bridge the gap between hardware advancements in robotics and its lagging software capabilities by introducing ARK, a Python-first open-source framework.
🛠️ Research Methods:
– ARK provides a Gym-style environment interface, integrates imitation-learning algorithms, and supports seamless switching between simulations and physical robots.
– It employs a lightweight client-server architecture with networked communication and includes optional C/C++ bindings for real-time performance.
💬 Research Conclusions:
– ARK lowers the entry barriers of robotic software development, accelerates research and commercial deployment, and demonstrates with comprehensive documentation and case studies that unify robotics and AI practices.
👉 Paper link: https://huggingface.co/papers/2506.21628
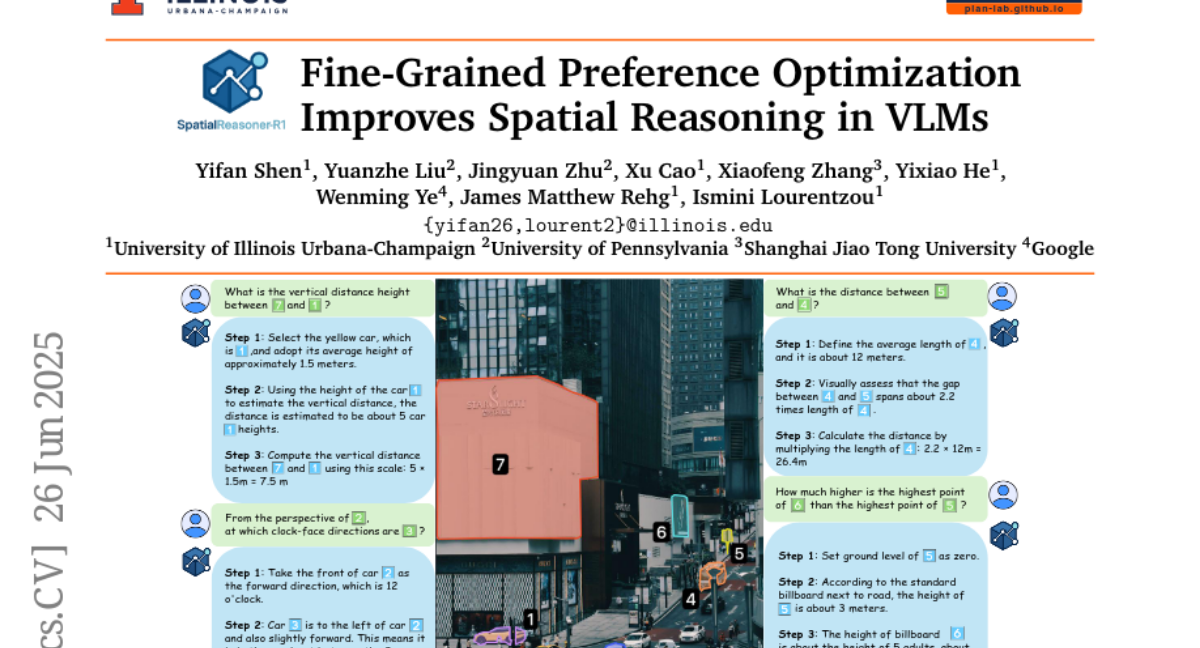
8. Fine-Grained Preference Optimization Improves Spatial Reasoning in VLMs
🔑 Keywords: SpatialReasoner-R1, Multi-Model Monte Carlo Tree Search, Direct Preference Optimization, Spatial Grounding, Vision-Language Models
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The study aims to enhance fine-grained spatial reasoning in Vision-Language Models by introducing SpatialReasoner-R1.
🛠️ Research Methods:
– Developed a Multi-Model Monte Carlo Tree Search method for generating diverse and consistent reasoning trajectories.
– Implemented fine-grained Direct Preference Optimization to improve descriptive grounding and logical reasoning, guided by a spatial reward mechanism.
💬 Research Conclusions:
– SpatialReasoner-R1 shows an average improvement of 4.1% over standard models in spatial quality tasks and a 9.0% gain in spatial quantity tasks.
– It sets a new state-of-the-art on SPATIALRGPT-Bench, outperforming the previous benchmark by 9.8% in average accuracy.
👉 Paper link: https://huggingface.co/papers/2506.21656
9. Shape-for-Motion: Precise and Consistent Video Editing with 3D Proxy
🔑 Keywords: 3D proxy, Dual-Propagation Strategy, video diffusion model, pose editing, object composition
💡 Category: Computer Vision
🌟 Research Objective:
– Introduce Shape-for-Motion, a framework for precise and consistent video editing using 3D proxy meshes and a decoupled video diffusion model.
🛠️ Research Methods:
– Develop a method that converts target objects in input videos to time-consistent 3D proxies, enabling direct editing on proxies.
– Design a Dual-Propagation Strategy to automatically propagate edits from a single frame to others, enhancing editing consistency.
💬 Research Conclusions:
– The framework facilitates various manipulations such as pose editing, rotation, and texture modification, achieving high-quality and controlled video editing.
👉 Paper link: https://huggingface.co/papers/2506.22432
10. MiCo: Multi-image Contrast for Reinforcement Visual Reasoning
🔑 Keywords: Self-supervised learning, Vision-Language Models, Image triplets, Reasoning, Reinforcement learning
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The study aims to enhance the reasoning ability of Vision-Language Models (VLMs) on multi-image tasks without using human-annotated question-answer pairs.
🛠️ Research Methods:
– The research utilizes self-supervised learning with image triplets and adapts rule-based reinforcement learning to facilitate visual comparison tasks.
💬 Research Conclusions:
– The approach demonstrates significant improvements in multi-image reasoning and general vision tasks, effectively applying reasoning without human annotations.
👉 Paper link: https://huggingface.co/papers/2506.22434
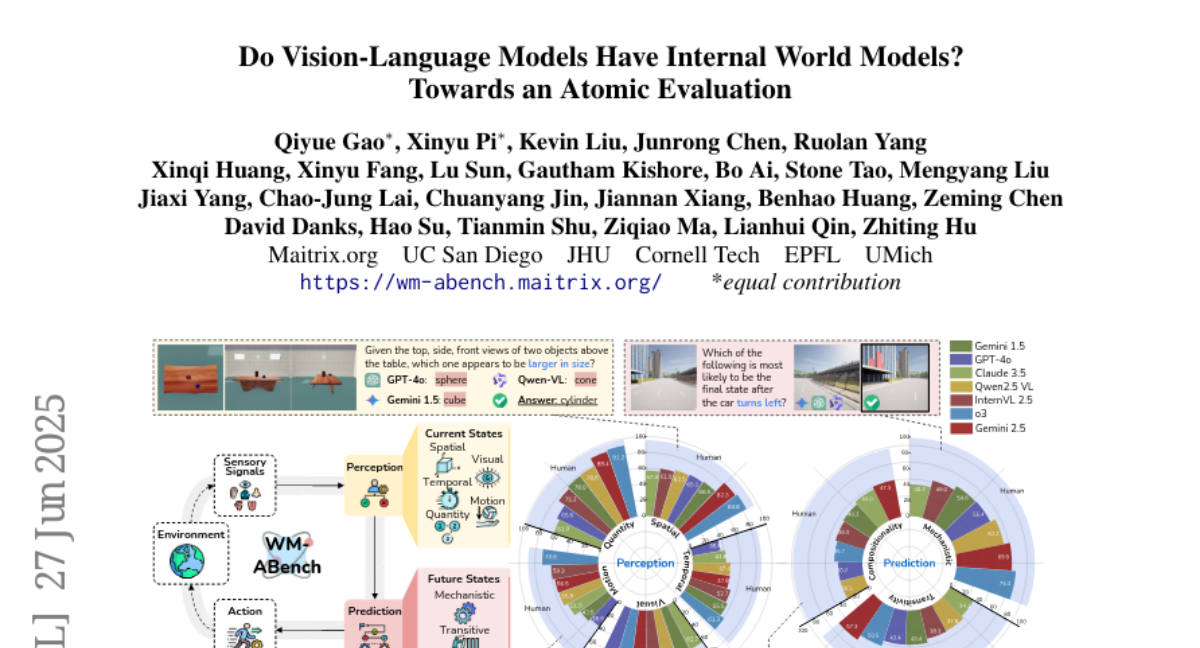
11. Do Vision-Language Models Have Internal World Models? Towards an Atomic Evaluation
🔑 Keywords: Vision-Language Models, World Modeling, Perception, Prediction, WM-ABench
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To evaluate the world modeling capabilities of Vision-Language Models by identifying their limitations in perception and prediction.
🛠️ Research Methods:
– A two-stage framework assessing Perception and Prediction capabilities, including a large-scale benchmark named WM-ABench, with experiments conducted across 15 VLMs in 6 simulated environments.
💬 Research Conclusions:
– VLMs demonstrate significant limitations in basic world modeling abilities, such as near-random accuracy in distinguishing motion trajectories and lack of disentangled understanding, revealing a gap with human-level world modeling.
👉 Paper link: https://huggingface.co/papers/2506.21876
12. The Automated LLM Speedrunning Benchmark: Reproducing NanoGPT Improvements
🔑 Keywords: Automated LLM Speedrunning Benchmark, NanoGPT, AI agents, Reproduction of Scientific Results, High-level Algorithmic Advancements
💡 Category: Natural Language Processing
🌟 Research Objective:
– The paper introduces the Automated LLM Speedrunning Benchmark to assess AI agents’ ability to reproduce results in active scientific research through NanoGPT speedrun tasks.
🛠️ Research Methods:
– The benchmark uses 19 tasks providing training scripts and optional hints, ranging from pseudocode to detailed descriptions, to evaluate AI agents’ efficiency in retraining a GPT-2 model.
💬 Research Conclusions:
– Recent reasoning LLMs face challenges in reimplementing known improvements despite detailed guidance, indicating limitations in automating scientific reproduction.
👉 Paper link: https://huggingface.co/papers/2506.22419
13. Spatial Mental Modeling from Limited Views
🔑 Keywords: MindCube, Vision Language Models, spatial mental models, cognitive maps, reinforcement learning
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To evaluate the ability of Vision Language Models (VLMs) to develop spatial mental models and improve understanding of unseen spaces using the MindCube benchmark.
🛠️ Research Methods:
– Systematic evaluation through cognitive mapping, perspective-taking, and mental simulation.
– Exploration of methods such as intermediate views, natural language reasoning chains, and cognitive maps.
– Implementation of the “map-then-reason” approach and reinforcement learning to enhance performance.
💬 Research Conclusions:
– Synergistic training that combines cognitive mapping and reasoning significantly improved VLMs’ accuracy from 37.8% to 60.8%.
– Applying reinforcement learning further increased accuracy to 70.7%.
– Constructing and using internal spatial mental models enhance understanding of unobservable spaces.
👉 Paper link: https://huggingface.co/papers/2506.21458