AI Native Daily Paper Digest – 20260603
1. OCC-RAG: Optimal Cognitive Core for Faithful Question Answering
🔑 Keywords: task-specialized language models, multi-hop reasoning, question answering, context faithfulness, structured reasoning traces
💡 Category: Natural Language Processing
🌟 Research Objective:
– To introduce the Optimal Cognitive Core (OCC) as a family of task-specialized small language models optimized for faithful question answering, requiring robust multi-hop reasoning without relying on memorized knowledge.
🛠️ Research Methods:
– Development of a novel training pipeline to synthesize multi-context, multi-hop QA data at scale, resulting in over three million examples designed to enhance multi-hop reasoning and context faithfulness.
💬 Research Conclusions:
– The OCC-RAG models, capable of producing structured reasoning traces with source citations, demonstrate that compact task-specialized language models can match or exceed the performance of larger general-purpose models in multi-hop reasoning and faithfulness benchmarks.
👉 Paper link: https://huggingface.co/papers/2606.00683
2. Trust Region On-Policy Distillation
🔑 Keywords: Trust Region, On-Policy Distillation, Distribution Mismatch, Outlier Estimation, Off-Policy Guidance
💡 Category: Natural Language Processing
🌟 Research Objective:
– The study aims to enhance the reliability and stability of On-Policy Distillation in large language models by addressing distribution mismatches between teacher and student models.
🛠️ Research Methods:
– TrOPD utilizes trust regions to ensure reliable supervision, implements credit assignment strategies, and incorporates outlier estimation techniques, such as gradient clipping and forward-KL estimation, alongside off-policy guidance using teacher prefixes.
💬 Research Conclusions:
– The proposed TrOPD consistently outperforms existing OPD baselines in areas such as mathematical reasoning, code generation, and general-domain benchmarks, demonstrating improved reliability and performance.
👉 Paper link: https://huggingface.co/papers/2606.01249
3. KVarN: Variance-Normalized KV-Cache Quantization Mitigates Error Accumulation in Reasoning Tasks
🔑 Keywords: KVarN, KV-cache quantization, Hadamard rotation, dual-scaling variance normalization, autoregressive decoding
💡 Category: Natural Language Processing
🌟 Research Objective:
– Introduce KVarN, a new calibration-free KV-cache quantizer to reduce error accumulation in autoregressive decoding for large language models.
🛠️ Research Methods:
– Utilizes Hadamard rotation and dual-scaling variance normalization to address and correct token-scale errors in KV-cache quantization.
💬 Research Conclusions:
– KVarN sets a new state-of-the-art for KV-cache quantization on generative benchmarks like MATH500, AIME24, and HumanEval, operating at 2-bit precision, and is shown to significantly minimize error accumulation.
👉 Paper link: https://huggingface.co/papers/2606.03458
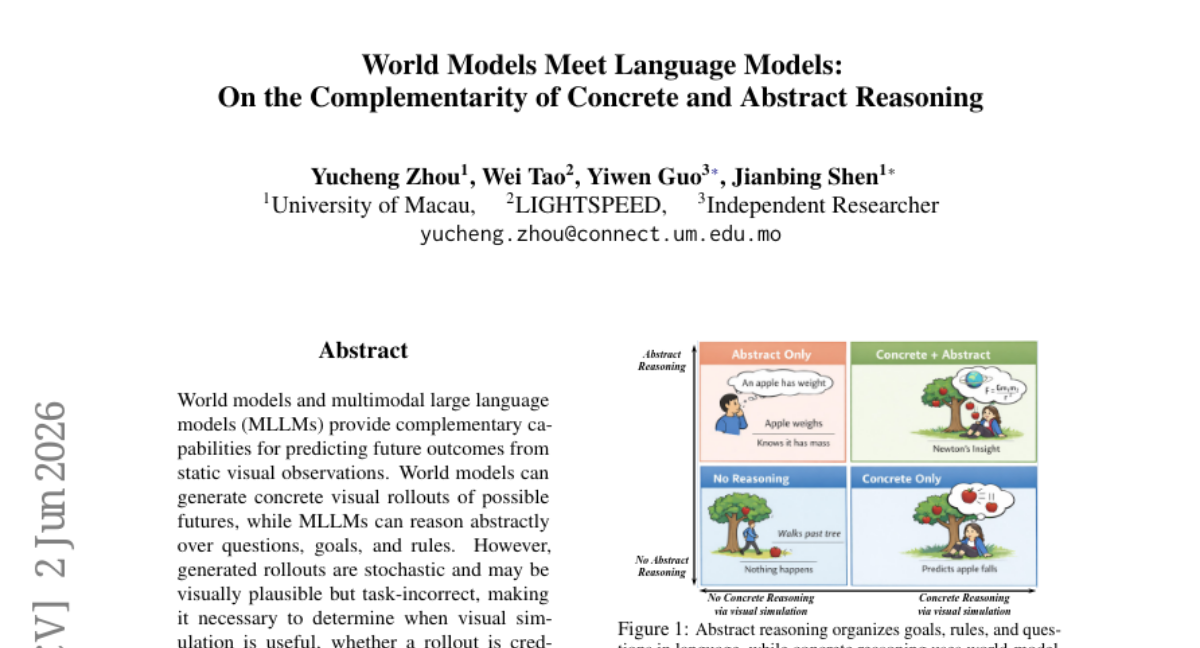
4. World Models Meet Language Models: On the Complementarity of Concrete and Abstract Reasoning
🔑 Keywords: Controlled Concrete Reasoning, World Models, Multimodal Large Language Models, Visual Simulation, Privileged-Future On-Policy Self-Distillation
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– To enhance prediction accuracy and robustness by combining visual simulation with abstract reasoning using privileged future information.
🛠️ Research Methods:
– Developed a method called Privileged-Future On-Policy Self-Distillation (PF-OPSD) which employs ground-truth future videos as privileged context for training.
💬 Research Conclusions:
– PF-OPSD outperforms baseline methods by 10.6% and 10.9% on constructed benchmarks VRQABench and OpenWorldQA, enhancing robustness against noisy or conflicting rollouts.
👉 Paper link: https://huggingface.co/papers/2606.03603
5. MIRA: Mid-training Rubric Anchoring for Source-Aware Data Selection
🔑 Keywords: MIRA, Mid-training, data selection, source-aware filtering, self-anchored rubric discovery
💡 Category: Natural Language Processing
🌟 Research Objective:
– The objective is to develop MIRA, a source-aware filtering framework for mid-training data selection in LLM development, focusing on balancing scalability and semantic accuracy across heterogeneous data sources using self-anchored rubric discovery.
🛠️ Research Methods:
– MIRA employs self-anchored rubric discovery to build rubrics during data selection, allowing it to evaluate source groups effectively and use scalable student scorers for full-corpus filtering.
💬 Research Conclusions:
– MIRA improves data selection by outperforming baseline methods in nine code benchmarks, matching the performance of full-corpus runs while using only half the tokens, thereby demonstrating efficiency and effectiveness.
👉 Paper link: https://huggingface.co/papers/2605.30288
6. Benchmarking Visual State Tracking in Multimodal Video Understanding
🔑 Keywords: Visual State Tracking, Multimodal Large Language Models, Continuous Perception, VSTAT, Video Understanding
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The objective is to evaluate and improve visual state tracking in Multimodal Large Language Models (MLLMs) which struggle particularly with video content.
🛠️ Research Methods:
– A new benchmark called VSTAT is introduced, consisting of 834 video clips with 1,500 questions, demanding continuous perception and integration across video streams.
💬 Research Conclusions:
– Despite strong performance on other benchmarks, MLLMs perform poorly on VSTAT, failing to visually perceive tracked events. Recent agentic approaches do not alleviate these challenges effectively.
👉 Paper link: https://huggingface.co/papers/2606.03920
7. NVIDIA OmniDreams: Real-Time Generative World Model for Closed-Loop Autonomous Vehicle Simulation
🔑 Keywords: OmniDreams, generative world model, action-conditioned video, photorealistic sensor generation, autonomous driving
💡 Category: Generative Models
🌟 Research Objective:
– The main objective is to develop OmniDreams, a generative world model trained from the Cosmos diffusion model, to enable real-time, action-conditioned video generation for evaluating autonomous driving policies in complex, unseen scenarios.
🛠️ Research Methods:
– Utilization of closed-loop simulation systems, mid- and post-training on 21k hours of driving scenarios, and integration with Alpamayo 1 policy model and AlpaSim orchestrator for creating a reactive simulation environment.
💬 Research Conclusions:
– OmniDreams successfully synthesizes complex, unobserved driving scenarios, supports scalable and comprehensive autonomous driving policy evaluation, and demonstrates potential as a backbone for policy architectures, outperforming existing models in preliminary tests using fewer parameters.
👉 Paper link: https://huggingface.co/papers/2606.03159
8. Ψ-Bench: Evaluating Persona-Sensitive Influencing in Persuasive Dialogues
🔑 Keywords: Persuasive Conversation, Personalized Agents, User Profiles, LLMs, Persona-Sensitive Influencing
💡 Category: Natural Language Processing
🌟 Research Objective:
– To systematically evaluate the proactive personalization of language models in realistic interactions, focusing on persuasion through conversation.
🛠️ Research Methods:
– Introduction of Ψ-Bench, a benchmark designed to assess the ability of Large Language Models (LLMs) to influence users using conversation in scenarios with embedded user profiles.
💬 Research Conclusions:
– Findings indicate that while LLMs can generate coherent arguments, they show limited effectiveness in persuasion. Providing access to user-specific profiles significantly enhances performance by 18.24%. The study emphasizes the importance of persona-sensitive influencing as a direction for developing more proactive personalized LLM agents.
👉 Paper link: https://huggingface.co/papers/2606.02754
9. Small RL Controller, Large Language Model: RL-Guided Adaptive Sampling for Test-Time Scaling
🔑 Keywords: Adaptive sampling, Markov decision process, Reinforcement learning, Lagrangian relaxation, Large language models
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The paper aims to optimize adaptive sampling for large language models using an MDP framework to balance correctness, latency, and computational cost.
🛠️ Research Methods:
– Adaptive sampling is formulated as a Markov decision process and optimized via reinforcement learning to train a lightweight sampling controller.
💬 Research Conclusions:
– The proposed method allows for efficient trade-offs between correctness, sampling rounds, and computation cost, showing superiority over existing baselines like ASC and ESC.
👉 Paper link: https://huggingface.co/papers/2606.03102
10. PaddleOCR-VL-1.6: Expanding the Frontier of Document Parsing with Under-Optimized Region Refinement and Progressive Post-Training
🔑 Keywords: PaddleOCR-VL-1.6, document parsing, data optimization, post-training, OmniDocBench
💡 Category: Computer Vision
🌟 Research Objective:
– To enhance document parsing performance by improving on the previous PaddleOCR-VL-1.5 model through targeted data optimization and a progressive post-training approach.
🛠️ Research Methods:
– Introduced a region-aware data optimization framework to identify and enhance weak areas from previous models.
– Employed a progressive post-training strategy based on curated data selection and reinforcement learning to achieve superior model performance.
💬 Research Conclusions:
– PaddleOCR-VL-1.6 achieved a state-of-the-art score of 96.33% on OmniDocBench v1.6, showcasing its competitiveness against leading VLMs and establishing a practical post-training recipe for the PaddleOCR-VL series.
👉 Paper link: https://huggingface.co/papers/2606.03264
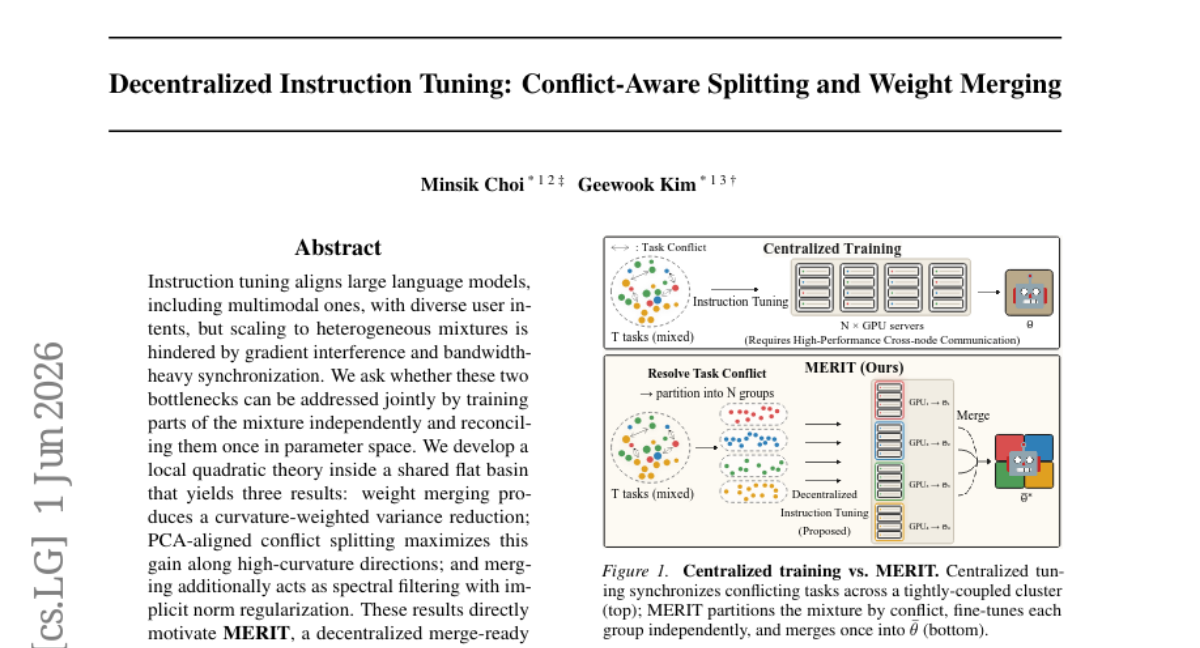
11. Decentralized Instruction Tuning: Conflict-Aware Splitting and Weight Merging
🔑 Keywords: Instruction tuning, large language models, gradient interference, decentralized training, weight merging
💡 Category: Natural Language Processing
🌟 Research Objective:
– The study aims to enhance instruction tuning of large language models by mitigating the issues of gradient interference and bandwidth-heavy synchronization through a decentralized training method.
🛠️ Research Methods:
– The research employs a decentralized training approach that involves independently training partitions of mixed datasets, resolving gradient conflicts, and merging results via a weighted averaging strategy.
💬 Research Conclusions:
– The proposed method, MERIT, effectively improves tuning performance on large language models like Qwen2.5-VL-3B and scales to larger models, showing comparable or superior performance to centralized methods with reduced communication costs.
👉 Paper link: https://huggingface.co/papers/2606.01717
12. OmniOPD: Logit-Free On-Policy Distillation via Speculative Verification
🔑 Keywords: OmniOPD, On-Policy Distillation, semantic similarity, black-box teachers, token-level feedback
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The objective of the research is to improve the limitations of standard On-Policy Distillation (OPD) by using a chunk-level semantic similarity approach instead of token-level logits, with a focus on black-box teachers.
🛠️ Research Methods:
– The proposed method involves using a logit-free, chunk-level supervision signal that incorporates Monte Carlo rollouts and a continuous semantic similarity metric over multi-token chunks. This method is further enhanced using a peak-entropy scheduler and a Dirichlet-Multinomial Bayesian prior to ensure stability and prevent policy collapse.
💬 Research Conclusions:
– OmniOPD outperforms the standard OPD method by up to +28.64% on competitive benchmarks like math, confirming its effectiveness. Additionally, it yields an additional +9.54% improvement when paired with stronger black-box teachers, surpassing the performance of self-exploratory Reinforcement Learning, thus proving its superiority in extracting reliable learning signals.
👉 Paper link: https://huggingface.co/papers/2606.01476
13. Value-Aware Stochastic KV Cache Eviction for Reasoning Models
🔑 Keywords: Value-aware Stochastic KV Cache Eviction, Reasoning Models, Cache Diversity, KV Cache Eviction, FlashAttention2
💡 Category: Knowledge Representation and Reasoning
🌟 Research Objective:
– The study aims to improve the accuracy of reasoning models under compression by introducing a new KV cache eviction method that protects large-magnitude states and promotes diverse eviction decisions.
🛠️ Research Methods:
– The researchers identified critical factors affecting KV cache eviction accuracy, including the impact of large-magnitude value states and the introduction of stochasticity for increasing cache diversity. They proposed the Value-aware Stochastic KV Cache Eviction (VaSE) method.
💬 Research Conclusions:
– VaSE enhances the average accuracy of Qwen3 models with 4x KV cache compression across various reasoning tasks compared to state-of-the-art selection methods, outperforming the strongest eviction method by over 4%, effectively balancing efficiency and accuracy.
👉 Paper link: https://huggingface.co/papers/2606.03928
14. Domain-Specific Data Synthesis for LLMs via Minimal Sufficient Representation Learning
🔑 Keywords: Domain-specific data synthesis, Inductive paradigm, Reference examples, Prompt tuning, Synthetic data distribution
💡 Category: Machine Learning
🌟 Research Objective:
– The objective is to address the challenge of domain-specific data synthesis using an inductive approach, learning domain representations from reference examples to improve code benchmark performance.
🛠️ Research Methods:
– The researchers developed a novel framework, DOMINO, which integrates prompt tuning with a contrastive disentanglement objective to extract domain-level patterns from reference examples, mitigating overfitting.
💬 Research Conclusions:
– DOMINO expands the support of synthetic data distribution, ensuring diversity and improving Pass@1 accuracy by up to 4.63% on coding benchmarks with implicit domain definitions, thus proving its effectiveness and robustness.
👉 Paper link: https://huggingface.co/papers/2605.30039
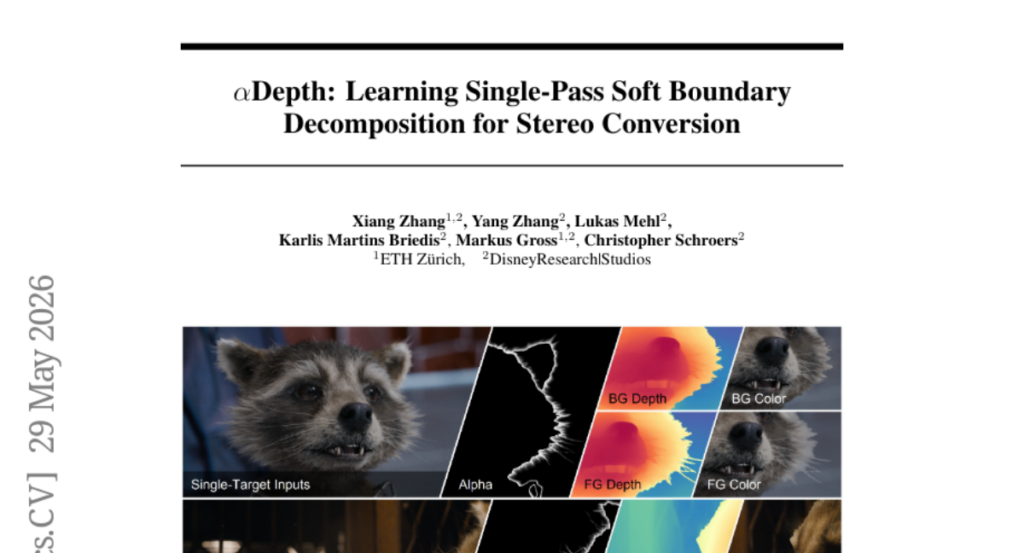
15. αDepth: Learning Single-Pass Soft Boundary Decomposition for Stereo Conversion
🔑 Keywords: αDepth, Circular Alpha Representation, stereo conversion, soft boundaries, layered representation
💡 Category: Computer Vision
🌟 Research Objective:
– To address the challenges posed by soft boundaries in stereo conversion through a novel layered representation approach, thereby improving depth modeling accuracy in complex scenes.
🛠️ Research Methods:
– Introduces αDepth, which utilizes Circular Alpha Representation (CAR) to allow for local boundary decomposition and efficient scene-level inference, overcoming the limitations of traditional matting techniques.
💬 Research Conclusions:
– αDepth achieves state-of-the-art performance in stereo conversion, effectively eliminating issues like background bleeding and structural distortions at soft boundaries without needing manual intervention.
👉 Paper link: https://huggingface.co/papers/2606.00386
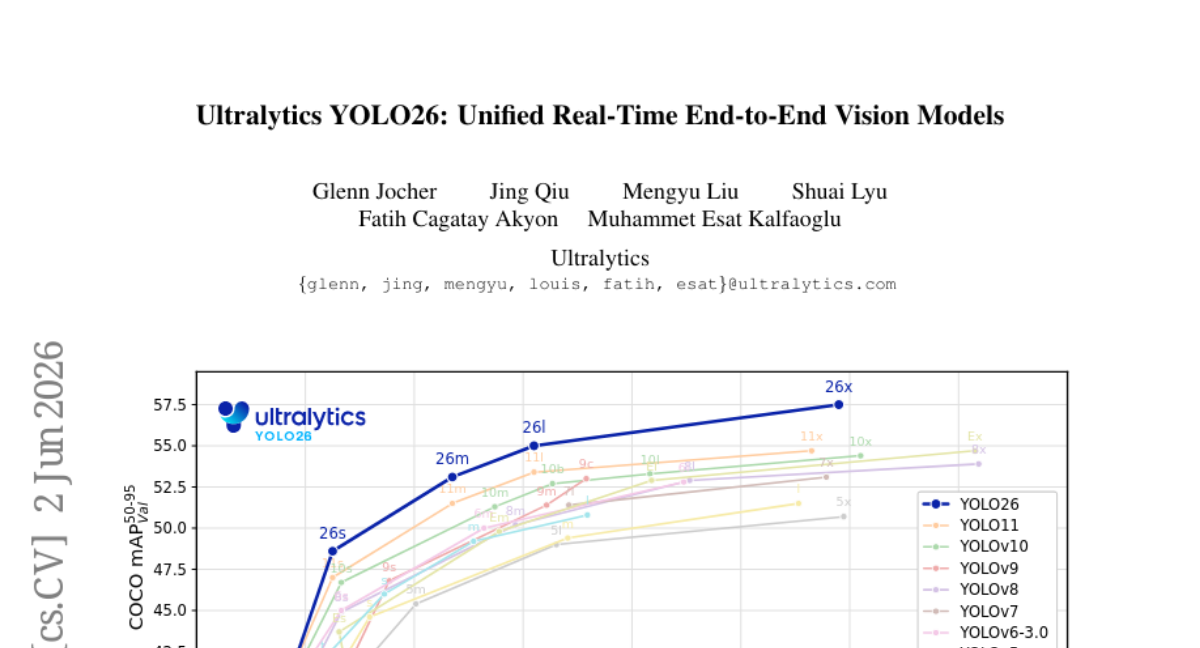
16. Ultralytics YOLO26: Unified Real-Time End-to-End Vision Models
🔑 Keywords: YOLO26, real-time vision, NMS-free, segmentation, pose estimation
💡 Category: Computer Vision
🌟 Research Objective:
– To develop a unified real-time vision model family, YOLO26, that overcomes the limitations of existing YOLO models by offering NMS-free inference, improved training strategies, and multi-task capabilities.
🛠️ Research Methods:
– Utilizes a dual-head design for native NMS-free end-to-end inference, employs a hybrid Muon-SGD optimizer and Progressive Loss for training, and ensures small object detection through STAL.
💬 Research Conclusions:
– YOLO26 advances accuracy and efficiency across tasks like detection, segmentation, and pose estimation, reaching 40.9-57.5 mAP on COCO with minimized latency, enhancing the performance of real-time detectors.
👉 Paper link: https://huggingface.co/papers/2606.03748
17. Mitigating Perceptual Judgment Bias in Multimodal LLM-as-a-Judge via Perceptual Perturbation and Reward Modeling
🔑 Keywords: Perceptual Judgment Bias, Multimodal Large Language Models, Visual Perturbations, Perceptual Fidelity
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The study aims to address the Perceptual Judgment Bias in multimodal large language models, where models prefer textual plausibility over visual evidence.
🛠️ Research Methods:
– The researchers propose a training framework using a Perceptually Perturbed Judgment Dataset and a structured GRPO-based reward combined with a batch-ranking objective to improve perceptual fidelity and evaluation consistency.
💬 Research Conclusions:
– The approach significantly enhances perceptual fidelity, ranking coherence, and alignment with human evaluation in multimodal judge benchmarks, establishing a pathway for robust and interpretable multimodal judges.
👉 Paper link: https://huggingface.co/papers/2606.02578
18. Prior Availability in Industrial Visual Sim-to-Real: A Review of CAD-Guided and CAD-Unavailable Regimes
🔑 Keywords: domain-gap, Industrial visual sim-to-real, CAD-available, CAD-unavailable, boundary-prior settings
💡 Category: Computer Vision
🌟 Research Objective:
– The objective of the research is to reframe Industrial visual sim-to-real as a domain-gap problem categorized by prior availability, for robust deployment across varied industrial conditions.
🛠️ Research Methods:
– The study distinguishes between CAD-available, CAD-unavailable, and boundary-prior settings, using empirical anchors on datasets such as T-LESS/BOP, MVTec AD, and VisA.
💬 Research Conclusions:
– The findings suggest that simply counting CAD renders does not ensure successful transfer; source distribution design and detector capacity are more significant, emphasizing the importance of prior availability to support deployment decisions.
👉 Paper link: https://huggingface.co/papers/2605.30581
19. WALL-WM: Carving World Action Modeling at the Event Joints
🔑 Keywords: video-action learning, Vision-Language-Action, semantic events, event-grounded pretraining, state-of-the-art performance
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The research aims to enhance video-action learning by transitioning from fixed action chunks to semantic events, leading to more flexible and scalable Vision-Language-Action training and inference.
🛠️ Research Methods:
– The WALL-WM model employs event-grounded Vision-Language-Action pretraining and utilizes a data ecosystem comprising event-level captions and cluster-balanced sampling to support scalable learning.
– Two inference modes are introduced: the event mode for variable-length execution and the unified mode with Staircase Decoding for fixed-length chunk inference.
💬 Research Conclusions:
– WALL-WM demonstrates broad generalization across languages, scenes, and tasks, achieving state-of-the-art performance in large-scale real-world generalization evaluations.
👉 Paper link: https://huggingface.co/papers/2606.01955
20.

21. Pressure-Testing Deception Probes in LLMs: Scaling, Robustness, and the Geometry of Deceptive Representations
🔑 Keywords: Deception Detection, Linear Probes, Distributional Shift, AUROC, Cross-Domain Transfer
💡 Category: Natural Language Processing
🌟 Research Objective:
– To assess why linear probes for deception detection in large language models fail under distributional shifts despite high performance on clean benchmark data.
🛠️ Research Methods:
– Conducted systematic tests across the Gemma 3 model family, examining four hypotheses about deception encoding, and analyzed multi-dimensional probes with style-augmented data.
💬 Research Conclusions:
– Probes obtain near-perfect AUROC on clean data but fail on stylistic shifts; however, style-augmented probes regain high detection accuracy.
– Single-direction and entropy-proxy hypotheses are rejected, with deception encoded in multi-dimensional, distributed sub-threshold features.
– Probe fragility is attributed to distributional narrowness rather than architectural limitations, as style-augmented probes recover detection effectiveness.
👉 Paper link: https://huggingface.co/papers/2605.27958
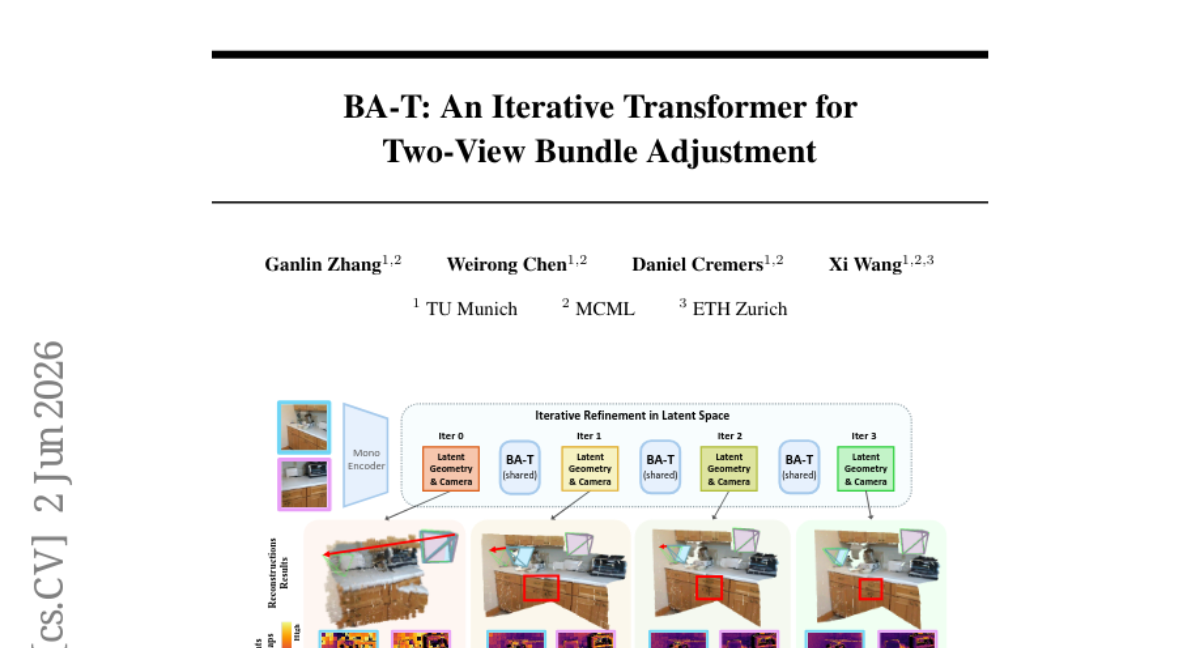
22. BA-T: An Iterative Transformer for Two-View Bundle Adjustment
🔑 Keywords: Iterative Transformer, 3D reconstruction, cross-view consistency, bundle adjustment, lightweight design
💡 Category: Computer Vision
🌟 Research Objective:
– To improve 3D reconstruction accuracy and cross-view consistency using an iterative Transformer architecture inspired by bundle adjustment.
🛠️ Research Methods:
– Implement an iterative Transformer called BA-T that uses structured updates as a repeatable layer in implicit token space, refining predictions through latent residual in a single lightweight layer.
💬 Research Conclusions:
– BA-T enhances pose and reconstruction accuracy across iterations, achieves stronger cross-view consistency than conventional models, and matches or surpasses larger models using only 16% of their decoder parameters.
👉 Paper link: https://huggingface.co/papers/2606.03287
23. AURA: Action-Gated Memory for Robot Policies at Constant VRAM
🔑 Keywords: Embodied AI, AURA-Mem, KV-cache, Recurrent Memory, Action-Utility
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– The research introduces AURA-Mem, a recurrent memory system designed to adapt to the constraints of embodied AI by reducing memory writes and efficiently managing memory resources.
🛠️ Research Methods:
– AURA-Mem employs a frozen vision-language-action backbone and a learned gate mechanism to determine when memory writes are necessary, based on action-impacting observations.
💬 Research Conclusions:
– AURA-Mem significantly outperforms traditional KV-cache systems by reducing memory writes by up to 9.19 times while maintaining accuracy, especially in bandwidth-limited environments typically encountered in robotics.
👉 Paper link: https://huggingface.co/papers/2606.02775
24. ClawHub Security Signals: When VirusTotal, Static Analysis, and SkillSpector Disagree
🔑 Keywords: AI agents, layered security governance, scanner disagreement, VirusTotal, NVIDIA SkillSpector
💡 Category: AI Systems and Tools
🌟 Research Objective:
– This research focuses on evaluating the discrepancies in detection rates across different types of scanners and attack surfaces within agent skills, which amplify the capabilities of AI agents.
🛠️ Research Methods:
– The study utilizes a sanitized dataset named ClawHub Security Signals encompassing 67,453 versions of agent skills, analyzing disagreements among three scanning tools: VirusTotal, static heuristic analysis, and NVIDIA SkillSpector.
💬 Research Conclusions:
– The extensive scanner disagreement highlights the need for layered security governance instead of relying on single-scanner decisions, with implications for agent-skill security requiring tailored security triage models.
👉 Paper link: https://huggingface.co/papers/2606.01494
25. A Multi-AI-agent Framework Enabling End-to-end Finite Element Analysis for Solid Mechanics Problems
🔑 Keywords: Multi-agent framework, Large language models, Finite element analysis, Solid mechanics, AI-empowered optimization
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The study aims to automate finite element analysis for solid mechanics using AbaqusAgent, which uses large language models to convert natural-language instructions into executable simulations.
🛠️ Research Methods:
– AbaqusAgent deploys a multi-agent framework composed of six agents handling pre-processing and post-processing steps in FEA, successfully validating 50 solid mechanics problems with an 86% success rate.
💬 Research Conclusions:
– AbaqusAgent improves the efficiency and accessibility of FEA, enhances human-simulation interaction, and integrates with AI-driven workflows for optimization and material characterization, thus advancing computational mechanics education.
👉 Paper link: https://huggingface.co/papers/2606.00138
26. Conditional Hypothesis Generation for LLM-Based Text Analysis with Researcher-Specified Covariates
🔑 Keywords: Conditional hypothesis generation, covariates, stratum imbalance, sign reversal, computational social science
💡 Category: Natural Language Processing
🌟 Research Objective:
– Introduce a conditional hypothesis generation framework that incorporates covariates to identify meaningful language variations across subgroups.
🛠️ Research Methods:
– Propose two econometrics-inspired methods: feature–covariate interactions for detecting sign reversals and within-stratum demeaning with inverse-frequency reweighting for equalizing underrepresented strata.
💬 Research Conclusions:
– Demonstrated improved performance over global baselines through synthetic experiments and expert evaluations on real-world datasets, showing that covariate-aware generation surfaces more useful hypotheses within relevant subgroups.
👉 Paper link: https://huggingface.co/papers/2606.03029
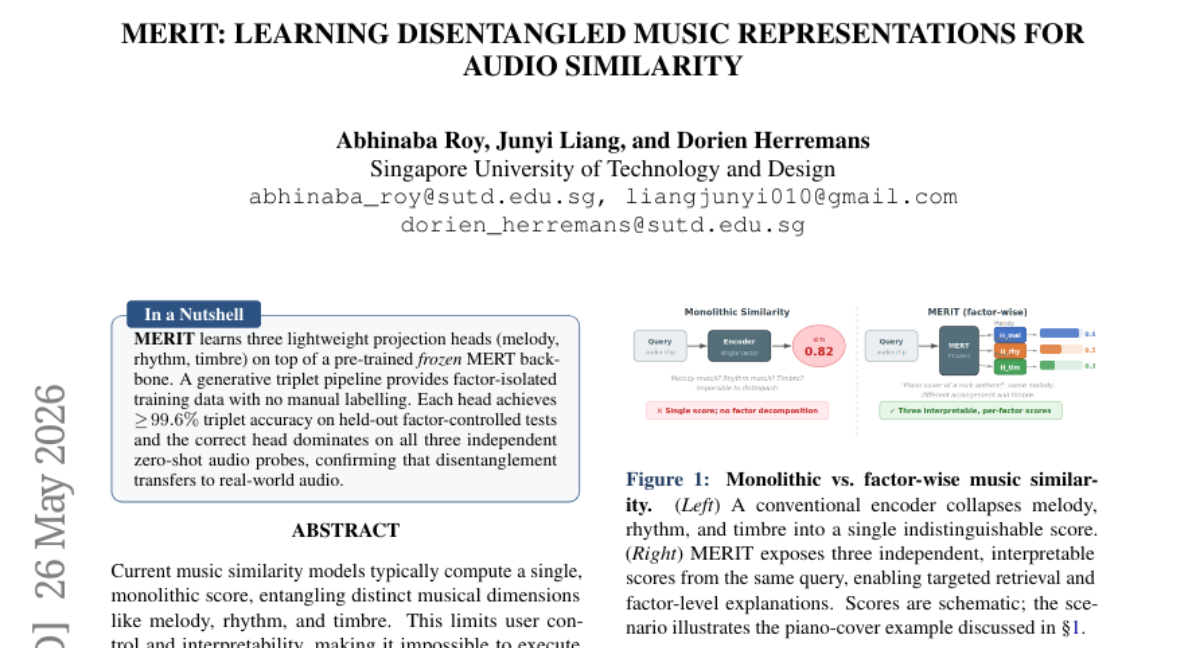
27. MERIT: Learning Disentangled Music Representations for Audio Similarity
🔑 Keywords: MERIT framework, conditional audio generation, source-separated stems, disentangled music representations, factor-specific music representations
💡 Category: Generative Models
🌟 Research Objective:
– Introduce MERIT, a framework designed to learn disentangled music representations focusing on melody, rhythm, and timbre to allow for nuanced musical queries.
🛠️ Research Methods:
– Employ a novel training strategy using conditional audio generation and source-separated stems to encourage single-factor variation in training data.
💬 Research Conclusions:
– Demonstrated strong factor-wise disentanglement where each representation head responds primarily to its intended perceptual dimension, applicable across both synthetic and real-world audio.
👉 Paper link: https://huggingface.co/papers/2605.27346
28. Diagnosing Harmful Continuation in Answer-Correct Long-CoT Training Traces
🔑 Keywords: Chain-of-thought, Fine-tuning, Post-conclusion continuation, Harmful continuation, Uncertainty
💡 Category: Knowledge Representation and Reasoning
🌟 Research Objective:
– Investigate the impact of post-conclusion continuations in answer-correct long chain-of-thought (CoT) traces on the fine-tuning outcomes of reasoning-oriented language models.
🛠️ Research Methods:
– Utilized a delete-only editor to execute answer-preserving suffix removal, comparing CoT-based supervised fine-tuning (SFT) on original and processed traces to assess training effects.
💬 Research Conclusions:
– Post-conclusion continuations in CoT traces negatively affect training, causing uncertainty-geometry mismatches. The introduction of Harmful Continuation Cut (HCC) as a boundary proxy offers a solution to address this issue.
👉 Paper link: https://huggingface.co/papers/2605.29288
29. PlatonicNav: Unveiling Semantic Correspondence in Navigation with Platonic Topological Maps
🔑 Keywords: Embodied visual navigation, Semantic maps, Vision-only approach, Training-free framework, PlatonicNav
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– To develop a training-free framework for embodied navigation using a vision-only approach that creates semantic maps and achieves language grounding through blind matching without utilizing paired vision-language data.
🛠️ Research Methods:
– Introduce PlatonicNav, a framework that extends the Platonic Representation Hypothesis by employing a self-supervised visual encoder to craft a Platonic Topological Map which fuses geometric and semantic data.
💬 Research Conclusions:
– Extensive experiments indicate that PlatonicNav can generalize across tasks, modalities, and embodiments without explicit cross-modal training, as evidenced by benchmarks and deployments.
👉 Paper link: https://huggingface.co/papers/2606.01788
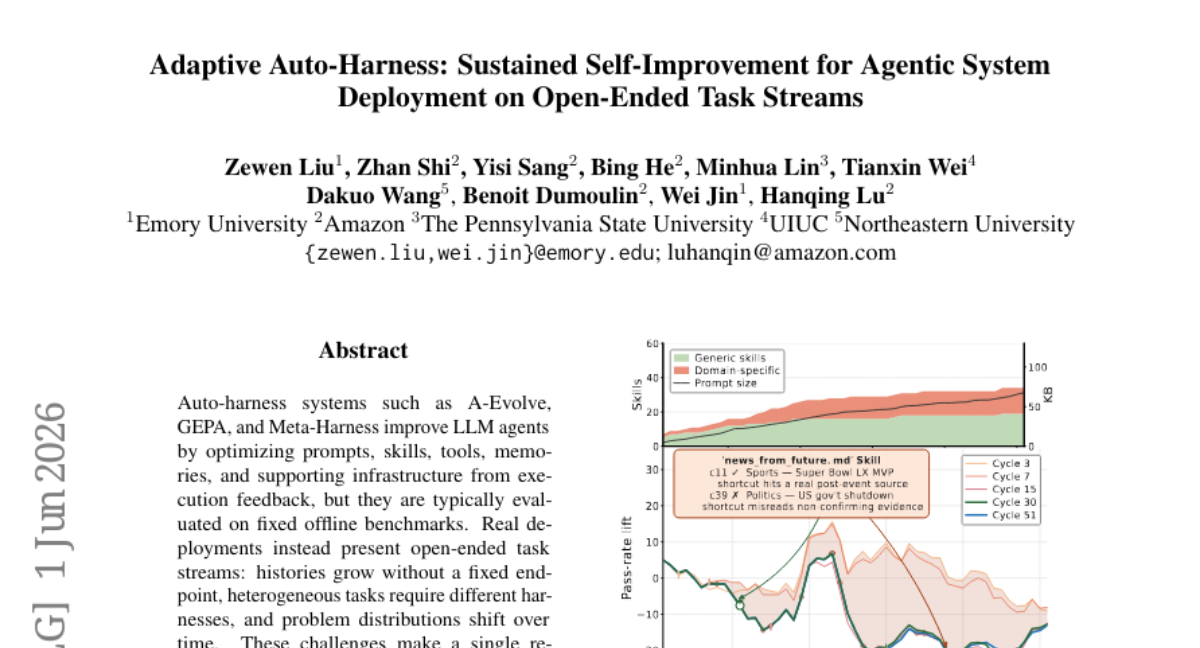
30. Adaptive Auto-Harness: Sustained Self-Improvement for Agentic System Deployment on Open-Ended Task Streams
🔑 Keywords: Adaptive Auto-Harness, LLM agents, evolution loss, adaptation loss, stateful multi-agent evolver
💡 Category: AI Systems and Tools
🌟 Research Objective:
– The primary goal of the research is to address dynamic task streams in auto-harness systems through a framework that decomposes performance gaps into evolution and adaptation losses for sustained performance improvement.
🛠️ Research Methods:
– Implementation of Adaptive Auto-Harness, which involves a stateful multi-agent evolver, a harness tree with solve-time routing, and human-steering hooks to manage and adapt to evolving task environments.
💬 Research Conclusions:
– The Adaptive Auto-Harness framework outperforms existing auto-harness baselines by effectively utilizing construction, routing, and targeted human steering across various streams such as prediction-market, security-competition, and event-forecasting.
👉 Paper link: https://huggingface.co/papers/2606.01770
31. Decoupled Residual Denoising Diffusion Models for Unified and Data Efficient Image-to-Image Translation
🔑 Keywords: Decoupled Residual Denoising Diffusion, unified I2I translation, domain harmonization, data efficiency, diffusion models
💡 Category: Generative Models
🌟 Research Objective:
– To propose Decoupled Residual Denoising Diffusion models (DRDD) that enhance data efficiency and performance in unified image-to-image (I2I) translation by separating noise diffusion for domain harmonization from residual diffusion for semantic mapping.
🛠️ Research Methods:
– DRDD introduces two sequential and independent diffusion stages: stochastic noise diffusion for domain harmonization and manifold lifting, and deterministic residual diffusion for semantic mapping within a fixed-noise domain.
💬 Research Conclusions:
– DRDD is compatible with mainstream diffusion models and provides robust, unified I2I translation even with limited paired data, offering substantial improvements in data efficiency.
👉 Paper link: https://huggingface.co/papers/2606.01048
32. Bootstrap Your Generator: Unpaired Visual Editing with Flow Matching
🔑 Keywords: Bootstrap Your Generator, unpaired training, flow matching, gradient routing, image and video editing
💡 Category: Generative Models
🌟 Research Objective:
– To develop a framework, Bootstrap Your Generator (ByG), enabling unpaired training of flow matching editing models, leveraging base model knowledge for improved generalization without extensive datasets.
🛠️ Research Methods:
– Utilization of instruction-following cues with cycle-consistency for structure preservation and routing gradients from downstream losses over clean predictions to noisy training states.
💬 Research Conclusions:
– ByG demonstrates state-of-the-art performance in data-scarce settings, effectively generalizes to new domains, and outperforms supervised baselines by bridging the train-inference gap and extracting robust semantic cues.
👉 Paper link: https://huggingface.co/papers/2606.03911
33. Language Models Need Sleep: Learning to Self-Modify and Consolidate Memories
🔑 Keywords: Deep Learning, Sleep Paradigm, Knowledge Seeding, Memory Consolidation, Reinforcement Learning
💡 Category: Machine Learning
🌟 Research Objective:
– The study introduces a novel Sleep paradigm in deep learning, inspired by human learning processes, to enhance long-term learning and self-improvement.
🛠️ Research Methods:
– Utilizes a two-stage process comprising Memory Consolidation through Knowledge Seeding and a Dreaming phase involving Reinforcement Learning, simulating sleep to consolidate memories and self-improve.
💬 Research Conclusions:
– Experiments demonstrate the effectiveness of the Sleep paradigm in improving continual learning, knowledge incorporation, and few-shot generalization, highlighting its importance in enhancing long-term learning capabilities.
👉 Paper link: https://huggingface.co/papers/2606.03979
34. TRON: Targeted Rule-Verifiable Online Environments for Visual Reasoning RL
🔑 Keywords: TRON, Scalable Reinforcement Learning, Visual Reasoning, Online Environment Substrate, Multimodal Reasoning
💡 Category: Reinforcement Learning
🌟 Research Objective:
– The paper introduces TRON, which aims to provide scalable and controllable reinforcement learning specifically for visual reasoning through an online environment that generates limitless diverse training instances with verifiable answers.
🛠️ Research Methods:
– The study presents an online environment substrate where training instances are generated on demand by a controllable generator-verifier program. This allows the creation of an unbounded stream of instances tailored to the difficulty requirement of ongoing training. The TRON suite includes 520 environments divided into five ability buckets, supporting both holistic and specialized training models.
💬 Research Conclusions:
– The implementation of TRON and its method notably enhances performance on ten multimodal reasoning benchmarks, showcasing efficacy across various models such as Qwen3-VL-4B, Qwen2.5-VL-7B, and MiMo-VL-7B-SFT.
👉 Paper link: https://huggingface.co/papers/2606.01599
35. AutoMedBench: Towards Medical AutoResearch with Agentic AI Models
🔑 Keywords: AutoMedBench, autonomous agents, medical-AI research, validation, verification
💡 Category: AI in Healthcare
🌟 Research Objective:
– The objective of AutoMedBench is to establish a comprehensive benchmark for autonomous medical-AI research. It aims to evaluate the performance of medical-AI agents across various workflow stages, with a particular focus on the validation stage.
🛠️ Research Methods:
– The study organizes agent performance evaluation into a five-stage workflow: Plan, Setup, Validate, Inference, and Submit. It includes long-horizon tasks in medical imaging and multimodal inference, evaluated under two difficulty tiers. Stage-level analysis is performed to identify strengths and weaknesses in the workflow.
💬 Research Conclusions:
– Findings highlight that the validation stage is the weakest link in the medical-AI workflow process, while the setup stage is the strongest. The study reveals that current agents excel in making pipelines executable but struggle with reliability verification, as evidenced by post-run error analysis focusing on verification and submission failures.
👉 Paper link: https://huggingface.co/papers/2606.01961
36. A Local Perturbation Theory for Cross-Domain Interference and Recovery in Multi-Domain RL
🔑 Keywords: Multi-domain reinforcement learning, Reinforcement learning, Large language models, Catastrophic forgetting, Conflict subspace
💡 Category: Reinforcement Learning
🌟 Research Objective:
– To investigate and address performance degradation in multi-domain reinforcement learning (RL) within large language models (LLMs) due to shared computational pathways.
🛠️ Research Methods:
– The study applies targeted refresh and rollback techniques and proves the impact of domain-specific training using a local perturbation model and analysis of second-order damage terms in a conflict subspace.
💬 Research Conclusions:
– The research demonstrates that sparse, low-dimensional parameter changes can experience interference in multi-domain RL, leading to performance loss. Techniques like domain refresh and rollback aid in recovering capabilities in specific tasks with limited collateral damage, providing a mechanistic account of interference and recovery.
👉 Paper link: https://huggingface.co/papers/2606.02398
37. Humanoid-GPT: Scaling Data and Structure for Zero-Shot Motion Tracking
🔑 Keywords: Humanoid-GPT, GPT-style Transformer, zero-shot generalization, motion corpus, dynamic behaviors
💡 Category: Robotics and Autonomous Systems
🌟 Research Objective:
– Introduce Humanoid-GPT, a Transformer model designed for whole-body control using a large-scale motion dataset.
🛠️ Research Methods:
– Utilize causal attention in a generative Transformer pre-trained on a 2B-frame retargeted corpus including major mocap datasets and in-house recordings.
💬 Research Conclusions:
– The model achieves robust zero-shot generalization to unseen motions and tasks, establishing a new performance frontier in tracking dynamic and complex behaviors.
👉 Paper link: https://huggingface.co/papers/2606.03985
38. From Activation to Causality: Discovery of Causal Visual Representations in the Human Brain
🔑 Keywords: BrainCause framework, generative and brain models, causal testing, neural representations, image-to-fMRI encoding model
💡 Category: Multi-Modal Learning
🌟 Research Objective:
– The study aims to identify valid neural representations of visual concepts in the human brain using the BrainCause framework, addressing the insufficient evidence provided by activation alone.
🛠️ Research Methods:
– The BrainCause framework combines generative and brain models to create controlled stimuli and conduct targeted causal testing. It uses an image-to-fMRI encoding model to predict brain responses and identify specific neural representations.
💬 Research Conclusions:
– The approach demonstrates that activation alone is insufficient to confirm concept representation, as many localizations could be false positives without causal validation. It recovers known functional localizations and identifies new candidate representations across multiple concepts.
👉 Paper link: https://huggingface.co/papers/2605.23895